Key Points
- Researchers have designed a system that makes an off-the-shelf quadruped robot nimble enough to walk a narrow balance beam for the first time ever.
- The robot was modified by mounting two reaction wheel actuators (RWAs) on it, one on the pitch axis and one on the roll axis, to provide control over the robot’s angular momentum.
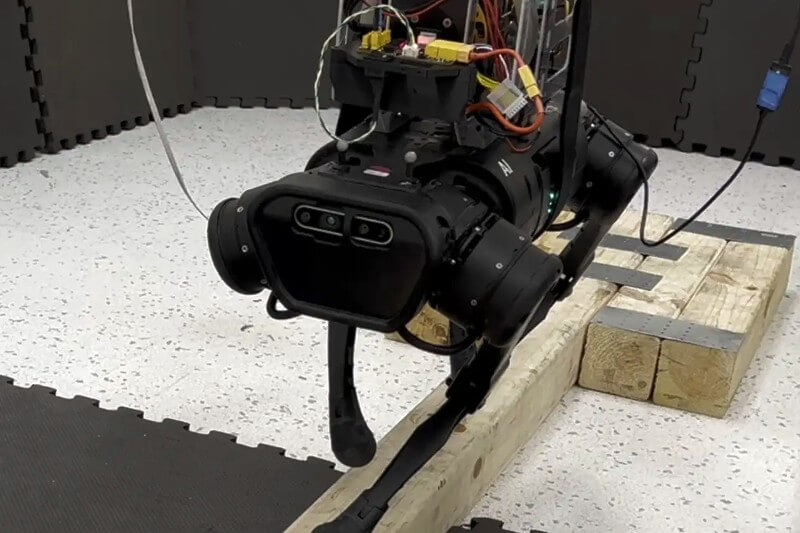
- The system’s balancing capabilities were tested successfully through experiments like dropping the robot upside down and having it reorient itself mid-air and land on its feet, and having it walk on a 6-centimeter-wide balance beam.
Researchers from Carnegie Mellon University’s Robotics Institute have successfully created a system that allows an off-the-shelf quadruped robot to walk on a narrow balance beam for the first time.
Quadruped robots usually move on flat surfaces and climb stairs with ease but struggle with walking over rough terrain and maintaining balance when one or two of their legs are not in contact with the ground. The research team modified the robot by mounting two reaction wheel actuators (RWAs) on it, which allowed the robot to balance itself independent of its feet’s positions.
Reaction wheel actuators are hardware devices commonly used in the aerospace industry to control the orientation of satellites in space. The team mounted two RWAs on the quadruped robot, one on the pitch axis and one on the roll axis, to control its angular momentum. With the RWA, the robot’s legs could be off the ground, and the RWAs would still maintain its balance. The team tested their system with a series of successful experiments, such as dropping the robot upside down and having it reorient itself mid-air and land on its feet, and having it walk on a narrow balance beam.
Zachary Manchester, the head of the Robotic Exploration Lab, called the experiment “huge” and believes that quadruped robots will transition from primarily being research platforms in labs to widely available commercial-use products. With further work, quadruped robots’ stabilizing capabilities could match those of instinctual four-legged animals and be used in high-stakes scenarios like search-and-rescue operations.
The team’s paper, “Enhanced Balance for Legged Robots Using Reaction Wheels,” has been accepted for the 2023 International Conference on Robotics and Automation.