Introduction
The prevailing concept of spacetime is due primarily to Minkowski’s geometrical contribution (1908) to Einstein’s Special Theory of Relativity. Minkowski saw in the relativistic interpretation of the Lorentz transformations the possibility for a two-dimensional representation of the peculiar interrelationships between bodies having large relative velocities. Assuming the validity of the tenets of Relativity, and assuming the correctness of the chosen geometric representation, it was expected that a graphic portrayal would express and corroborate relativity in its mathematical form, that “physical laws might find their most perfect expression” (1908, 76), facilitating further insights and hypotheses concerning the nature of spacetime. It is my intention to show that while the original expectations remain justified, the spacetime diagram as developed by Minkowski is inherently flawed, and its axiomization has fostered significant misunderstandings about the nature of spacetime and light.
1. The Minkowski Diagram
The basic concept of the Minkowski Diagram is to use a single dimension to represent the three spatial dimensions so that one remains available for representing time in a realistic two-dimensional projection. Minkowski first presented the diagram as a derivation of a hyperbolic function (c2t2-x2 = 1), but this approach was rendered comparatively cumbersome by subsequent variations. Figure 1 is an example of the most popular version today. As is typical of Minkowski diagrams, the x-axis represents space, while its perpendicular, the t-axis, represents time — both according to an observer S who is considered to be at rest and moving in time along the t-axis.1 The coordinate axes x’ and t’ represent the reference frame of an observer S’ who is in motion relative to S; t’ is given by x-vt = 0 (where v is the velocity of S’ relative to S), and x’ is given by x/t = v. The diagonal vector determined by x = t is considered to represent the world-line of light emanating from the origin O.
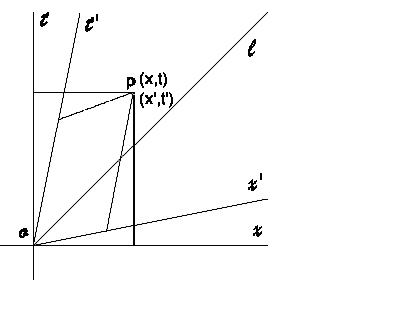
Figure 1
Given this basic construction, any event P in spacetime will be located by observers in the diagram as a point at the intersection of lines drawn parallel to their spacetime axes. For S the coordinates in Figure 1 are (x,t), while for S’ they are (x’,t’). The difference between the two measurements may be derived geometrically by means of “calibration hyperbolae” given by x2-t2 = constant, from which the unit of measure for S’ can be obtained from the measure of S, or they can be derived mathematically by the Lorentz Transformations.2 The geometric depiction of the relationship thus seems to parallel the mathematics, as is a minimum requirement of any diagram intended as a meaningful representation.
Whereas the Minkowski Diagram in the form shown in Figure 1 is especially designed to depict the differing observations of the same event which result from having different frames of reference (relative motion), a variation as shown in Figure 2 is concerned with the different paths in spacetime (the “world-lines”) of the observers or bodies themselves. In this diagram the reference frame and world-line of the primary observer is given by vector A; vectors B, C, and D are bodies in motion relative to A, with D being a light-quantum traveling along one of the l-vectors, which represent the travel of light impinging upon and radiating from the origin O. The paths of the vectors in relative motion are given by the equation for transforming the primary observer’s time-axis as in Figure 1 (x-vt = 0).
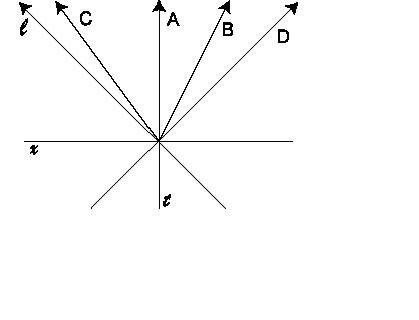
Figure 2
Still another variation on the Minkowski Diagram is given in Figure 3, where the interval between two events in the reference frame of a primary observer is compared with the corresponding measures between the events according to various other references. The coordinates described by these observations may be obtained from the Lorentz Transformations, or more readily by the equation for the “invariant interval,” where the proper time s of a body in its own frame of reference is compared to its relative spatio-temporal motion according to other frames by s = (x2-t2).5. By plotting a set of hypothetical observations, a parabolic pattern is formed, with the proper time of the primary observer at the vertex and the coordinates of the observations from the more extreme reference frames approaching the light-vectors.
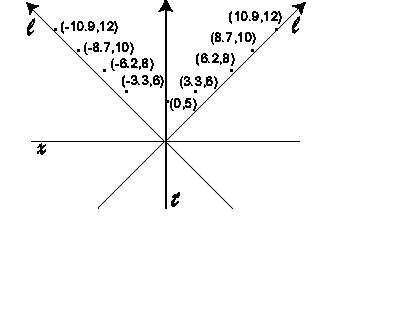
Figure 3
2. The Fundamental Concepts
The various Minkowski Diagrams share two fundamental concepts which (in addition to the seminal insight concerning the geometric nature of the spatio-temporal relationship) comprise the important contributions of the diagrams to the current understanding of spacetime. One concept is of a parabolic geometry of spacetime, which is thought to supersede the classic notion of flat “Euclidean” space. Even aside from the influence of gravitation, the nature of the equations for transforming coordinates has suggested a parabolic relationship between uniform frames of reference, a function that approaches Euclidean flatness only when relative motion is small relative to c. This can be seen in the comparison of unit length between frames, as obtained in Figure 1 with the “calibration hyperbolae,” and in the parabolic pattern in Figure 3 formed by the comparison of observed motion with proper time.
The second concept is of the “light-cones,” the consideration of which has had an enormous influence in shaping subsequent thought about the nature of spacetime, especially in cosmology. From the recognition that it would be impossible for an event to be observed if it were to take place beyond the reach of the fastest signal, and from the graphic representation of that limit with the light-vectors in the Minkowski Diagrams, it has been concluded by some that there exists an “elsewhere,” a set of events lying outside the light-cones which is effectively beyond our spacetime world of experience. Attempts have been made by the more speculatively-inclined to understand everything from black holes to anti-matter in terms of this apparent boundary, and if nothing else the light-cones have consumed a considerable amount of theoretical energy.
Both concepts, of a parabolic geometry and of the light-cones, have seemed to follow from the geometric representation of the tenets of Special Relativity and to have gained credence from that distinguished association. But I wish to show that both are in fact based on a fundamental mistake in the geometric translation of Relativity, the correction of which exposes them as being without foundation.
3. The Discrepancy
There is certainly no more important precept in relativity theory than the stricture that in describing the motion of a body we must specify the frame of reference from which the observation is being made. When it’s stated, for instance, that a body travels 3 light-seconds (ls) in 5 seconds (sec), unless we’re to return to the absolutism of classical physics, we must specify according to whose standard of distance, and according to whose measure of time. If it is to be assumed that unless otherwise stipulated the measurements given are those of an observer at rest in the same reference frame as ourselves, the statement actually consists of an observation that a body travels 3 ls in space relative to the observer (and ourselves), while we travel 5 sec in time. Although this may be useful in so far at it accounts for two aspects of the relationship, it remains inadequate as a description of the relative motion of the body itself. To fully describe the observed motion relativistically would be to report that a body travels 3 ls in space relative to our stationary spatial reference, and a number of sec in time that is relative to our corresponding temporal reference of 5 sec, given by (x2-t2).5, which in this case yields (52-32).5 = 4. Strictly speaking, therefore, the body will travel 3 ls and 4 sec (its clock will be observed to tick 4 seconds), and we will measure that travel from a reference of 0 ls and 5 sec.
The significance of the distinction being made here is most striking in the description of light: When it’s said in a Newtonian perspective that light travels 1 ls in 1 sec, we make a relativistic correction and say that it actually travels 1 ls relative to our state of rest in space (although our spatial reference is arbitrary in the special case of light) and 0 sec relative to our motion in time.
To neglect either of these distinctions is to invite a serious error in the development of one’s understanding of relativistic phenomena. Yet it’s an oversight built right in to the Minkowski diagrams, as I will attempt to demonstrate.
Figure 4 is a composite of the various Minkowski diagrams already discussed, and will serve to illustrate the permeation of a pre-relativistic confusion inherent to all of them. Vector A again represents the primary observer who is at rest in the coordinate system defined by the x and t axes, and who is located initially at events (0,0) and ultimately, after 5 sec, at (0,5). Vector B represents a body in motion having the coordinate system defined by the x’t’ axes; B is located by A after 5 seconds at (3,5). Point P is an event located by A at (2,3) and by B, according to the Lorentz Transformations, at (0.25,2.25). Point C represents the measurements of an observer who locates A at the completion of the interval represented by the diagram at the coordinates (-4.9,7.0).
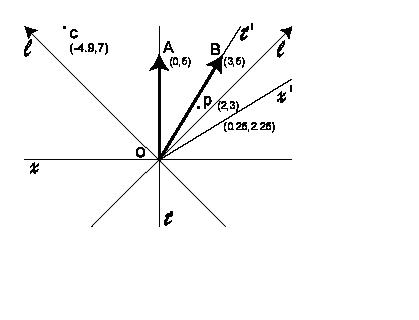
Figure 4
Let’s examine the various features of Figure 4 in terms of Relativity. First, if A is considered to be at rest and measuring its own time interval as t = 5 sec, we know that its observation of the clock of any other body will be given by t’ = t (1-v2).5. If a body is in motion relative to A, this will yield a value for t’ that is less than t, reflecting the fact that a moving clock, i.e., relative motion in time, slows when there is relative motion in space. Yet the Minkowski Diagram depicts the world-lines of bodies in motion as attaining the same temporal ordinate as the rest frame — note, for instance, vector B, and the light vectors, in Figure 4. This is not just an oversight, nor is it a misrepresentation of the intent. It’s an error upon which the spacetime diagram in its present form is founded. The notion of the light-cones, which may be taken as characterizing the format of the Minkowski Diagram, is what makes this conclusion unavoidable. The light vectors, representing the limit c, are projected according to relative motion in space, but according to the observer’s own time, treated as an independent, absolute measure. This is a remarkable misrepresentation, given that it’s axiomatic in relativity theory that light would not travel 5 ls in 5 sec relative to observer A in the diagram — it would travel 5 ls in 0 sec, and it should therefore be drawn directly along the x-axis in an accurate projection. To portray light as traveling along the diagonals is not only to produce a distortion of the relative motion of light, but of any world-line in the diagram, because as limits, the placement of the light-vectors requires that all coordinates representing relative motion be delimited accordingly.
The location of event P in Figure 4 displays a similar sort of misrepresentation, as the clocks of the observers are superimposed on the event, treated as an instantaneous object of observation. The coordinates of P in the diagram, whether according to A or B, express a spatial relationship between event and observers, appropriately enough, but not so the given temporal ordinates, which represent the distance in time of each observer from her own earlier reference points (where t and t’ = 0 according to A). Relativity theory holds that it’s meaningless to project an observer’s clock at the location of a distant event — there is no time of an isolated event, no duration to express in comparison to the motion in time of various observers; there are, according to Relativity, only times as registered by the observers as an event is detected.
It is important to keep in mind that a spacetime diagram is a representation of process — it projects the world of an observer as it develops relative to an observer who moves in time — and because a diagram is unavoidably static, the time-vector of the observer can easily be mistaken as somehow leaving space behind, on the x-axis. But at any moment represented in the diagram the observer’s time-vector is still actually in space, on the space-axis, and an isolated event — no matter when it occurs — takes place somewhere in the observer’s projection of space. So to portray an event in a spacetime diagram, it’s best understood as taking place on a world-line, at a time corresponding to a clock traveling along the world-line. If it’s an isolated event it could be placed on the space axis, where it is taken as occurring when t = 0 in the primary observer’s frame of reference, when the time of the event can be considered null.3
Before leaving Figure 4, there is one additional consideration, the significance of point C. The anomaly in this case is that while we know that a rest frame represented by the x,t axes will undergo more motion in time than it will observe in any other (in other words, the clock of any other reference frame will appear to be moving more slowly), the coordinates of C place it at t = 7 relative to t = 5 for the rest frame of A. This is because the coordinates at C (-4.9,7) express the measure of some observer’s own proper time and observed spatial distance attained between O and A corresponding to the given measure of A at 0 ls and 5 sec. The observations of one reference system have thus been superimposed upon another, without any actual congruence between the observation and the x,t axes. The coordinates of point C and the form of diagram in which they appear (Figure 3) actually depict relative measurement, not relative motion; the x,t axes are used both as a reference system for the primary observer and as a matrix for the superimposition of other observations. There may be nothing inherently wrong with superimposing reference frames in this manner, except as with the location of events according to an absolute standard of time, it is done in the Minkowski Diagrams in a way that misrepresents the relativistic reality in a pre-relativistic, two-dimensional projection.
4. An Alternative Diagram
The relativity of spacetime imposes the requirement that in any portrayal of the motion between frames of reference we take the perspective of one at a time, and maintain it consistently as we determine the progress of the other(s). Figure 5 is a construction of such a procedure. Vector A represents the motion of an observer whose frame of reference is described by the coordinate axes x,t. A travels 5 sec in time in the scope of the diagram while being considered at rest in space. Body B, which as a matter of convenience is located initially at O, moves away from the vicinity of A at a rate, according to A, which takes it 4 ls in 5 sec. The coordinates of B (4,3) can again be derived from the Lorentz transformations, or geometrically by means of the gradations in the diagram. By locating B at 3 seconds in time, it is indicated that the clock of B has moved 3 sec in the reference frame of A.
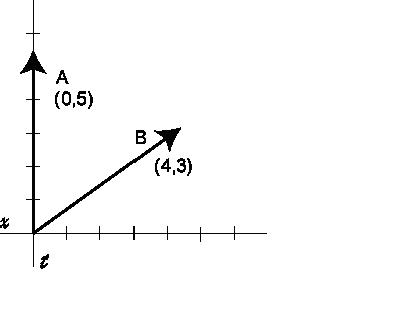
Figure 5
Note that the world-line of B in this alternative diagram is especially interesting in its contrast with the world-lines of the Minkowski Diagrams: At a velocity of .8c relative to A, the vector of B has already transgressed the 45o angle of the “light-cones”; in fact, as can be verified easily enough, a 45o angle to the coordinate axes in Figure 5 would represent a velocity of only .71c. A consideration of higher relative velocities can provide an appreciation that the vectors representing their motion will approach the x-axis as the limit c, and that a vector representing the motion of light will travel directly along the axis.
5. A Reevaluation of the Minkowskian Concepts
The two fundamental contributions of the Minkowski diagrams to our idea of spacetime can now be reevaluated in view of the foregoing discussion. The concept of the parabolic or “Lorentz” geometry of spacetime is a residue of the pre-relativistic nature of the diagram: Given the absolute treatment of the temporal perspective in the Minkowski Diagram, all vectors except the world-line of the primary observer are distorted by a parabolic function simply because their motion in time is confounded with that of that observer. The same sort of function results from the attempt to correlate an instantaneous point with other events located at coordinates given by relative spatial distance but the observer’s absolute temporal orientation; this has been supposed to be a relationship of independent points, but is actually just the relationship of a frame of reference to its own absolutized temporal perspective. It is the misrepresentation of Relativity, not Relativity itself, that is responsible (in terms of non-accelerating frames of reference) for the concept of a non-Euclidean geometry of spacetime.
Secondly, the “light-cones” have been made to disappear by a rigorous relativistic representation of relative motion. In their place, in two-dimensional terms, is a circular boundary as shown in Figure 6, formed by the projection of possible world-lines emanating from and impinging on O. The boundary of the circle isn’t the horizon of an exotic “elsewhere,” but simply the limit imposed by the temporal scope chosen for the particular diagram.
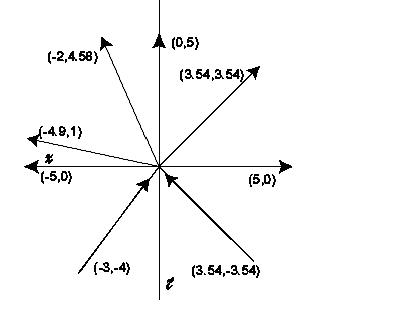
Figure 6
6. Exploration of the Alternative
The most outstanding feature of the alternative diagram is the Euclidean triangle formed by the relationship between an observer and a body in motion, as shown in Figure 7. Vector A describes the time it takes according to observer A for body B to reach its x-ordinate at the termination of the diagram; these measures are given in Figure 7 as t sec and x ls, respectively. The temporal ordinate t’ of vector B is, once again, given by the Lorentz transformation, or by the equation for the invariant interval. Vector A thus relates to x and t’ as a hypotenuse to a Euclidean triangle; and since vector B constitutes the actual hypotenuse of that triangle, it follows that regardless of the relative velocity between the two bodies, their world-lines will be the same length. This suggests that uniform motion in spacetime may be relative, but uniform motion itself is absolutely equivalent across reference frames.
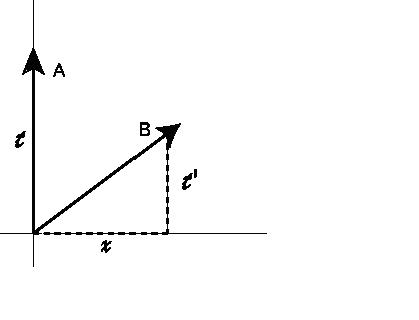
Figure 7
Another interesting feature of the relationship between bodies according to the alternative concerns the “invariant interval.” In the Minkowski Diagrams, and in Relativity theory in general, the Interval is conceived as no more than the “separation,” an apparently fortuitous constant without physical significance, generally termed as the square root of the difference between the spatial distance between events according to the observer (squared) and the time according to the observer (squared) — i.e., s = (x2-t2).5. This formula has seemed to require the introduction of the imaginary number i, the square root of a negative. In terms of the alternative, it’s just a misrepresentation of the actual relationship given by t = (x2+t’2).5, or t’ = (t2-x2).5. In these latter expressions, and in the graphic representation, the interval is comprehensible as an actual physical measure, the proper time of the body being observed.
It is arguable that the two-dimensional depiction of the relationship between observer and a body in motion in the alternative diagram expresses the actual relativistic relationship, at least in terms of the gravity-free spacetime motion between bodies according to one frame of reference. If we are to consider the alternative to have heuristic value it is reasonable to expect that it can somehow render the reversal of frames geometrically comprehensible, and Figure 8 demonstrates the manner by which such a transformation can be effected, expanding on the relationship depicted in Figure 5.
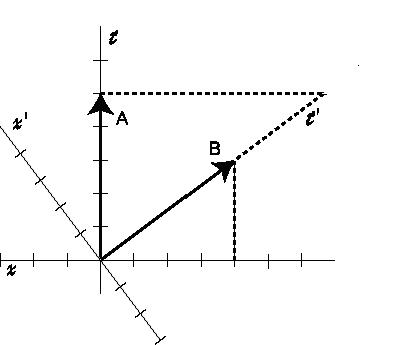
Figure 8
First, based on the principle that vector B, while skewed relative to A, is at rest in its own frame with A considered to be in motion, the x’-axis is drawn perpendicular to B in order to represent its spacetime orientation relative to A. Now since it is desired to view A as it appears to B concurrent with A observing B at the coordinates (4,3), the temporal ordinate of B must be determined relative to the proper time of A, which is 5 sec.4 To find this mathematically it is reasoned that if B measures the temporal motion of A as 5 sec, and if by the reversal of frames A is now taken to be traveling at .8c, then by the Lorentz transformations (t’ = t / (1-v2).5), the clock of B in its own frame is 8.33 sec; the ultimate distance between A and B according to B is given by x’ = x / (1-v2).5, which yields 6.67 ls.
To achieve the same result geometrically, it can be derived by extending the vector of B in Figure 8 to the point B’ where it would intersect a line drawn from A parallel with the x-axis, as this forms a Euclidean triangle in which vector A and the distance along x between A and B’ relate to B’ as a hypotenuse. And since the angle ? (read “?” as the Greek letter Theta as represented in Figure 9) between vectors is the same in either spacetime orientation, B’ relates to A as the measure of proper time as A had related to the proper time of B. This is proven by the following:
B’ = A csc ?
= 5 * 5/3
= 8.33
while x’ is given by
x’ = A cot ?
= 5 * 4/3
= 6.67
This result from the perspective of B is given in Figure 9. Vector A is extended to A” at a length that will equal that of B’ in accordance with the earlier postulate of the equivalence of world-lines; at this point the spatial distance of body A from the origin according to B is exactly what we would expect mathematically, as is its proper time.
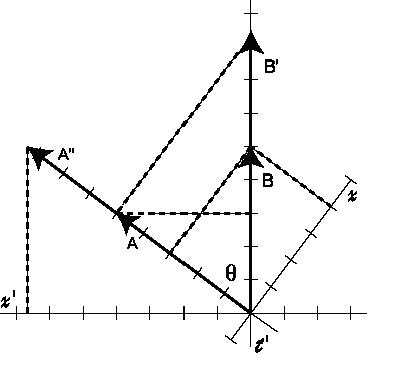
Figure 9
Two bodies having different frames of reference are thus simultaneously represented both as they appear to themselves and to each other, and a diagrammatic symmetry corresponding to that of the four-dimensional relationship is achieved. This result should not be surprising, because once the misconception that the relationship between two bodies in uniform motion is non-Euclidean has been corrected, it is to be expected that the spacetime structure (abstracting from gravitation) can be accurately represented in a two-dimensional Euclidean projection. The Lorentz Transformations presume, after all, a simple perpendicular relationship between space and time; and although the relationship between particular temporalities given by t’ = (t2-x2).5 is indeed parabolic, the fact that a hypotenuse relates to its sides by a parabolic function presupposes the right-angle of a Euclidean triangle. The parabolic relationship between different reference frames should therefore be understood as derivative and incidental to the essential Euclidean relationship between world-lines.
Several significant corollaries can be derived from the consideration of the two-dimensional depiction of spacetime. The representation of motion in spacetime as a relative variation from the perpendicular structure suggests that the distortion of time between frames is just the product of the perspective from which one views a motion which is — no matter what its spatial or temporal components — entirely homologous: Motion in space can be regarded as motion in time slightly skewed, while motion in time, although it seems to be something quite distinct, is simply the same sort of motion but in a perpendicular “direction.” This idea, if not new, is nonetheless translated into a coherent picture in the alternative, with a potential for the greater clarification of our concept of time.
Another significant entailment of the alternative illuminates the otherwise perplexing contradiction wherein two bodies can each be at rest and yet also in relative motion. In the coordinate system of A in Figure 9 the vectors A and B’ each have an equal extension in time, while in the coordinate system of B, vectors B and A” have an equal temporal extension. Thus from either frame of reference there is a suggestion of an underlying simultaneity between the temporal position of a body at rest and that of a body in motion when the one in motion is observing the one at rest; the instant of observation according to one frame takes place at another instant according to the second, but that latter instant coincides with precisely the same distance in time according to the first. Despite their differing individual orientations in spacetime — despite the relativity of motion — each body in uniform motion is moving orthographically in spacetime, and at a rate identical to all others in uniform motion. The paradox can be attributed to a dichotomy between finite references and a non-finite spacetime structure. But the exploration of this and other entailments of relative motion according to the alternative can best be undertaken in another context.
7. On the Nature of Light
A further consideration worth making here is of the nature of light as it is suggested by the alternative diagram. We know that the proper time of light is zero when measured from any other reference frame. This peculiarity is given by the mathematics of Special Relativity, although it’s not made strikingly evident by that more abstract form of representation, and although the Minkowski Diagram has tended to obfuscate the fact. In the geometric translation of the alternative diagram this zeroing of temporal motion is quite graphically revealed as suggesting that light literally does not move in time – and not just relatively so, because all coordinate systems agree on the motionless clock.
It may be arguable that is makes just as much sense to say that from the frame of reference of a photon, only light moves in time, but that issue is secondary here – either way, there is an explanation available for what has otherwise been accepted as inexplicable.
There are two characteristics of light that are distinctive and comprehensible in terms of the diagram if light doesn’t move in time, at least from the frame of reference of non-luminous bodies: As is well-known, the velocity of light is both invariant and ultimate. If uniform temporal motion is, by the equivalence of world-lines (as demonstrated in the alternative diagram), taken to be identical in magnitude to motion along the space-axis, it follows that each un-accelerated observer will measure light in its three-dimensional motion as traveling the same distance in space as time elapses in that observer’s reference frame. While the measure of the distance traveled by a beam of light will vary between frames, the rate will always be agreed upon.
The ultimate, or limiting characteristic of the velocity of light is explained with the recognition of the space-axis as the limit of relative motion. If the world-lines of all bodies are, again, taken as having the same extension, but as having varying spatial and temporal components to their relative trajectories, the limiting spatial velocity will be the magnitude of a world-line along the space axis measured in terms of the same magnitude along the time axis. Hence one second in time is the same distance (but in a perpendicular direction) as 300,000 km.
8. Conclusion
The Minkowski Diagrams have been shown to be based on a non-relativistic perspective, a view of developments taken from an absolute projection of the observer’s clock. The result has been a confusion of frames of reference and a parabolic distortion of relativistic relationships which, in the limited realm of Special Relativity, actually remain Euclidean. The use of the Minkowski Diagram has led to significant misconceptions, as with theories involving the light-cones and the geometry of spacetime in the absence of gravitational influences, and to obfuscations, as of the distinctive nature of light.
An alternative diagram has been offered, one that maintains a relativistic frame of reference, and is able as a result to consistently represent other bodies in their relationships to that frame. It has been shown that the alternative diagram is capable, at least in those respects considered, of maintaining an independent conformity with the predicted relationships of relativity, and that it provides a means of comprehending some of the otherwise inexplicable properties of light.
Notes
1. As a matter of convenience t is generally multiplied by c so that space and time can be expressed in distances of the same scale. I prefer instead to calibrate them by giving time in seconds (sec) and space in light-seconds (ls).
2. The Lorentz Transformations are t’ = (t-v)/(1-v2).5 and x’ = (x-vt)/(1-v2).5, with v as velocity proportional to c.
3. If it is considered important to represent the occurrence of an isolated event after the diagram “begins,” or if it’s desired to portray a series of isolated events on the diagram, some of them occurring when the time of the observer is not at t = 0, each event could be placed on a cut-away space-axis above or below the x-axis, labeled t = 2 for example, but at a point given by coordinates like (null,3). A broken line, a diagonal, might be used to show the connection between the occurrence of the event at t = 2 and the observation of the event (at, say, t = 5), without suggesting that the connection is in any way related to a world-line.
4. We could, of course, just as well reverse the frames according to the given proper time of B, and observe A as it appears to B when B is at 3 sec.
References
Minkowski, H., “Space and Time”, 1908, in The Principle of Relativity, H.A. Lorentz, A. Einstein, H. Minkowski, and H. Weyl, trans: W. Perrett and G.B. Jeffery, 1923.
ScienceBlog.com has no paywalls, no sponsored content, and no agenda beyond getting the science right. Every story here is written to inform, not to impress an advertiser or push a point of view.
Good science journalism takes time — reading the papers, checking the claims, finding researchers who can put findings in context. We do that work because we think it matters.
If you find this site useful, consider supporting it with a donation. Even a few dollars a month helps keep the coverage independent and free for everyone.
[email protected]
[email protected]
[email protected]
I have identified an alternate form of Loedel diagram that I think is worth considering. In this alternate form, the x and x’ labels on the axes of the standard Loedel diagram are switched, as the the labels on the ct and (ct’) axes. One then determines the coordinates of a point in space-time by dropping normals to the axes, rather than drawing lines parallel to the axes. The transformation between x’-ct and x-ct’ is orthogonal, involving a pure rotation through the angle alpha, where sin(alpha) = v/c. Check it out, and see what you think. Is it easier to use?
Chet Miller
Wilmington DE USA
DI Herculis Eclipsing Binary Stars Solution: The problem that Einstein’s 100,000 PHD space-time Physicists could not solve
This is the solution to DI Her “Quarter of a century” Smithsonian-NASA Posted motion puzzle that Einstein and the 100,000 space-time physicists including 109 years of Nobel prize winner physics and physicists and 400 years of astronomy and Astrophysicists could not solve and solved here and dedicated to Drs Edward Guinan and Frank Maloney
Of Villanova University Pennsylvania who posted this motion puzzle and started the search collections of stars with motion that can not be explained by any published physics
For 350 years Physicists Astrophysicists and Mathematicians and all others including Newton and Kepler themselves missed the time-dependent Newton’s equation and time dependent Kepler’s equation that accounts for Quantum – relativistic effects and it explains these effects as visual effects. Here it is
Universal- Mechanics
All there is in the Universe is objects of mass m moving in space (x, y, z) at a location
r = r (x, y, z). The state of any object in the Universe can be expressed as the product
S = m r; State = mass x location
P = d S/d t = m (d r/dt) + (dm/dt) r = Total moment
= change of location + change of mass
= m v + m’ r; v = velocity = d r/d t; m’ = mass change rate
F = d P/d t = d²S/dt² = Force = m (d²r/dt²) +2(dm/d t) (d r/d t) + (d²m/dt²) r
= m ? + 2m’v +m”r; ? = acceleration; m” = mass acceleration rate
In polar coordinates system
r = r r(1) ;v = r’ r(1) + r ?’ ?(1) ; ? = (r” – r?’²)r(1) + (2r’?’ + r?”)?(1)
F = m[(r”-r?’²)r(1) + (2r’?’ + r?”)?(1)] + 2m'[r’r(1) + r?’?(1)] + (m”r) r(1)
F = [d²(m r)/dt² – (m r)?’²]r(1) + (1/mr)[d(m²r²?’)/d t]?(1) = [-GmM/r²]r(1)
d² (m r)/dt² – (m r) ?’² = -GmM/r²; d (m²r²?’)/d t = 0
Let m =constant: M=constant
d²r/dt² – r ?’²=-GM/r² —— I
d(r²?’)/d t = 0 —————–II
r²?’=h = constant ————– II
r = 1/u; r’ = -u’/u² = – r²u’ = – r²?'(d u/d ?) = -h (d u/d ?)
d (r²?’)/d t = 2rr’?’ + r²?” = 0 r” = – h d/d t (du/d ?) = – h ?'(d²u/d ?²) = – (h²/r²)(d²u/d?²)
[- (h²/r²) (d²u/d?²)] – r [(h/r²)²] = -GM/r²
2(r’/r) = – (?”/?’) = 2[? + ? ? (t)] – h²u² (d²u/d?²) – h²u³ = -GMu²
d²u/d?² + u = GM/h²
r(?, t) = r (?, 0) Exp [? + ? ? (t)] u(?,0) = GM/h² + Acos?; r (?, 0) = 1/(GM/h² + Acos?)
r ( ?, 0) = h²/GM/[1 + (Ah²/Gm)cos?]
r(?,0) = a(1-?²)/(1+?cos?) ; h²/GM = a(1-?²); ? = Ah²/GM
r(0,t)= Exp[?(r) + ? ? (r)]t; Exp = Exponential
r = r(? , t)=r(?,0)r(0,t)=[a(1-?²)/(1+?cos?)]{Exp[?(r) + ì ?(r)]t} Nahhas’ Solution
If ?(r) ? 0; then:
r (?, t) = [(1-?²)/(1+?cos?)]{Exp[? ?(r)t]
?'(r, t) = ?'[r(?,0), 0] Exp{-2?[?(r)t]}
h = 2? a b/T; b=a? (1-?²); a = mean distance value; ? = eccentricity
h = 2?a²? (1-?²); r (0, 0) = a (1-?)
?’ (0,0) = h/r²(0,0) = 2?[?(1-?²)]/T(1-?)²
?’ (0,t) = ?'(0,0)Exp(-2?wt)={2?[?(1-?²)]/T(1-?)²} Exp (-2iwt)
?'(0,t) = ?'(0,0) [cosine 2(wt) – ? sine 2(wt)] = ?'(0,0) [1- 2sine² (wt) – ? sin 2(wt)]
?'(0,t) = ?'(0,t)(x) + ?'(0,t)(y); ?'(0,t)(x) = ?'(0,0)[ 1- 2sine² (wt)]
?'(0,t)(x) – ?'(0,0) = – 2?'(0,0)sine²(wt) = – 2?'(0,0)(v/c)² v/c=sine wt; c=light speed
? ?’ = [?'(0, t) – ?'(0, 0)] = -4? {[? (1-?) ²]/T (1-?) ²} (v/c) ²} radians/second
{(180/?=degrees) x (36526=century)
? ?’ = [-720×36526/ T (days)] {[? (1-?) ²]/ (1-?) ²}(v/c) = 1.04°/century
This is the T-Rex equation that is going to demolished Einstein’s space-jail of time
The circumference of an ellipse: 2?a (1 – ?²/4 + 3/16(?²)²—) ? 2?a (1-?²/4); R =a (1-?²/4)
v (m) = ? [GM²/ (m + M) a (1-?²/4)] ? ? [GM/a (1-?²/4)]; m<<M; Solar system
v = v (center of mass); v is the sum of orbital/rotational velocities = v(cm) for DI Her
Let m = mass of primary; M = mass of secondary
v (m) = primary speed; v(M) = secondary speed = ?[Gm²/(m+M)a(1-?²/4)]
v (cm) = [m v(m) + M v(M)]/(m + M) All rights reserved. [email protected]
I just realized – you’re right. I took the subtraction of velocities according to A.
Still, the extension of B to when and where he observes E expresses the invariance, the proper time of E from both frames, A and B.
Burt,
You wrote, regarding his modification and commentary on my diagram, “I’ve treated E simply as an event, an instant of time somewhere in space, not as the end of a world-line. By definition, events are not bodies with clocks and speed – they just happen somewhere and that’s that.… The 0.84 that I mentioned is not time; it is ds^2 = dt^2-dx^2, the square of the spacetime interval.â€
If you’re treating E simply as an event, then nothing I wrote about a world-line related to E applies. According to A, it happens at 1 second, 0.4 ls distant. There is no meaningful spacetime interval between O and E – as you said, an event doesn’t travel in space, which means there are no relativistic effects for the observer. Similarly, B will record the event in time at a point parallel to the x’ axis between E and B’s world-line, and in space at a point parallel to the t’ axis between E and the x-axis.
Burt continues: “Let’s stick to two coordinate systems and two events (O and E) and then you show me how your diagram treats the invariance of the spacetime interval between O and E for observers A and B (obviously with spacetime interval defined as per standard relativity theory).â€
I did treat just two coordinate systems – the reference frame of world-line OE wasn’t considered, I merely connected the events to give substance to your spacetime interval.
If O and E are unconnected events, there is no world-line, there is no meaningful spacetime interval between them, there is only the observer’s measure of space and the observer’s measure of time, all within his coordinate system. If an observer records a flash of light in the distance, it might be the explosion of an object that was stationary relative to the observer, or the object might have been traveling at .5c. As an isolated event it has no history.
I’ve shown that the spacetime interval is not a mysterious constant, but actually a body’s proper time when projected on the alternative diagram, and constant for that reason, and meaningful for that reason. If you’re going to critique the alternative diagram, you can’t do it in terms of the Minkowski diagram. If however we consider a world-line between O and E, there is an invariance, and it’s the proper time of the body moving along the world-line, as I’ll show below.
Burt rejects my claim that the alternative diagram works exactly as it should, with B observing E’s interval, or proper time, as 0.92 seconds at a distance of about 0.68 ls: “Wrong result and exactly the problem with your diagram! In a correct relativistic treatment, your B will observe event E to happen 1.2 seconds after event O and at a distance of ~0.775 ls ‘behind’ B (as per my Fig. 2, modified from your figure 8).â€
If my math is wrong it’s no reflection on the diagram, the projection is essentially the same. But I’ll take it step by step. Whether you posit a “spacetime interval†with relativistic effects or a world-line between O and E, the observations of E by A and B will be the same in terms of the proper time or the “spacetime interval†of OE between events. In your example, consider OE to be a world-line, the spatial distance between O and E according to A is 0.4 ls after 1 second according to A’s clock, B moves 0.8 ls in the same time according to A:
E’s velocity relative to B is given by the relativistic subtraction of velocities (with velocities expressed proportional to c):
v = (v1-v2) / (1 – (v1)(v2))
= (.8-.4)/(1-.8*.4)
= .4/.68
= .59 ls
With a relative velocity of .59 ls, the proper time of E relative to B at 1 second according to B is given by:
t’ = (1-.592).5
= (1-.3481).5
= .6519.5
= .807 seconds
Multiply 1 second by .92/.807 to get B’s time when observing E’s proper time at .92 seconds, which yields 1.14 seconds, and multiply .59 ls by .92/.807 to get .67 ls, the distance E travels in 1.14 seconds according to B.
The point of all this is that the alternative diagram accurately represents both frames of reference, A and B, and it does so in a perfectly Euclidean manner. The Minkowski diagram distorts the relationship by first projecting all the world-lines according to the time of the primary observer, then compensating by translating the relationships between axes. If a graphic representation doesn’t illustrate relationships accurately, it’s no improvement on the serial listing of numeric expressions, and it’s problematic in that it leads to invalid or meaningless concepts, as in the light-cones and the invariant interval.
Hi Jim.
I’ll respond only to your last one, because on the M-diagram I’ve decided I’ll agree to differ from you and leave it there…
In your second reply you wrote: “In your modification and commentary on my diagram you’ve treated E as both an isolated event 0.4 ls distant from A and as the terminus of a world-line emanating from O.
1. No, I’ve treated E simply as an event, an instant of time somewhere in space, not as the end of a world-line. By definition, events are not bodies with clocks and speed – they just happen somewhere and that’s that. So “the clock of body E would record 0.92 seconds ( t’ = (12-.42).5)” as you wrote is incorrect. It is your observer B (which is not present at event E), that observes 0.92 seconds for the time interval between events O and E (according to your diagram, that is). The 0.84 that I mentioned is not time; it is ds^2 = dt^2-dx^2, the square of the spacetime interval.
You wrote: “As for the coordinate rotation, where you treat E as a world-line, or spacetime interval, the diagram is allegedly “flawed†because A doesn’t directly observe B’s observation of E.”
2. As said in 1, I’m not treating E as a world-line. It is a point on a coordinate system which can be transformed to a point on a rotated coordinate system by simple trig.
3. Your last paragraph is confusing because you treat event E as belonging to a third coordinate system. Let’s stick to two coordinate systems and two events (O and E) and then you show me how your diagram treats the invariance of the spacetime interval between O and E for observers A and B (obviously with spacetime interval defined as per standard relativity theory).
Finally, you wrote: “… the diagram works exactly as it should, with B observing E’s interval, or proper time, as 0.92 seconds at a distance of about 0.68 ls.”
4. Wrong result and exactly the problem with your diagram! In a correct relativistic treatment, your B will observe event E to happen 1.2 seconds after event O and at a distance of ~0.775 ls ‘behind’ B (as per my Fig. 2, modified from your figure 8).
Regards, Burt
Burt,
In your modification and commentary on my diagram you’ve treated E as both an isolated event 0.4 ls distant from A and as the terminus of a world-line emanating from O. As an event occurring 0.4 ls from A, the time of the event according to A’s clock is 1 second, which A will observe at 1.4 seconds as having occurred 0.4 seconds earlier. As a world-line representing a body moving 0.4 ls relative to A, when A’s clock has recorded 1 second, the clock of body E would record 0.92 seconds ( t’ = (12-.42).5). (Not, incidentally, 0.84 seconds – you neglected to take the square root.)
As for the coordinate rotation, where you treat E as a world-line, or spacetime interval, the diagram is allegedly “flawed†because A doesn’t directly observe B’s observation of E.
The velocity of E relative to A is less than the velocity of E relative to B (.59c), so the difference between the clock of B and the clock of E will be greater than between the clocks of A and E. Consequently, B will observe the event at the terminus of E’s interval at a later time than A does. If you extend B’s world-line to the time when B will observe E (about 1.14 seconds), the diagram works exactly as it should, with B observing E’s interval, or proper time, as 0.92 seconds at a distance of about 0.67 ls.
Burt, I’ll respond to your two comments in separate comments.
First, your subject-line seems to suggest that you think I’ve asserted that the M-diagram is Euclidean. I hope you realize that my point is that it’s a flaw in the diagram that it isn’t Euclidean.
Responding to your points:
1. Burt wrote that the illustration of the relationship between world-lines as they move in spacetime “was a secondary purpose: the main purpose was to show how the speed of light and the spacetime interval ds^2 = |dx^2 – dt^2| remain constant under change of inertial frame of reference. That’s what special relativity is about.â€
Burt, you’re saying that the “main purpose†of special relativity is about two constants? It’s primarily about… non-relativity? That would be odd. I have to think I’m a little closer to the primary purpose when I say it’s about explaining and (for Minkowski in particular) illustrating the relativity of the relationship between world-lines in spacetime (light being exceptional), inspired by the need to explain the constancy of c.
I’ve shown in the alternative diagram that the “spacetime interval†is the measure of a body’s proper time between two events. It is a constant, agreed upon by any inertial frame of reference, but when derived from the Minkowski diagram it has no physical significance – it just is. And proper time is most clearly expressed in the perfectly Euclidean relationship exampled with a body moving 4 ls according to an observer in 5 seconds of an observer’s time. The “spacetime interval†= the moving body’s proper time = 3 seconds, i.e., t’ = (t2-x2).5. The illustration of this is is one of my primary purposes with the alternative diagram.
2. Burt wrote “There are always two inertial frames involved on a Minkowski spacetime diagram – one can call one the reference frame and the other the moving frame, but there are two frames, as per my 1 above.â€
Yes, but I said “based on one frame of reference.†The orthogonal frame xt represents the observer who measures other bodies in relative motion. And it’s the coordinate system of xt that is translated into not necessarily two, but actually any number of other frames.
3. Burt wrote “The Minkowski diagram actually portrays both frames’ perspective, more specifically, it gives those ‘physical laws [that] might find their most perfect expression’, i.e., the invariance of the speed of light and the spacetime interval in both frames.â€
I’ll take this up in response to your #6. For the moment I’ll just refer you back to my point in response to #1.
4. Burt wrote that the Minkowski diagram “shows the (two)-dimensional relationship between bodies moving in spacetime pretty accurately if you read the diagram as designed. It is possible that you have a ‘distorted view’ of that relationship, maybe because you are sticking to Euclid’s geometry. I have sympathy with this, because I started out more or less the same as you – a very similar diagram of my own that eventually proved to be fatally flawed…â€
Well, of course, reducing someone’s difference of opinion to a less-evolved station on the path to wisdom is usually better left unsaid.
If I were to be pedantic I would be satisfied to point out that there is no “(two)-dimensional relationship between bodies in spacetimeâ€, it’s four-dimensional, but that level of nit-picking isn’t productive except as an argument against further mutual nit-picking. More to the point, I’ve shown in #1 above that the relationship given by t’ = (t2-x2).5 is perfectly Euclidean.
5. In response to my point that nothing actually happens on the world-line of the observer in the ‘static’ frame (call it A) at 1.833 seconds, Burt agreed (rather triumphantly, it seems): “thanks! Yea, I agree: nothing actually happens on the world line of the observer in the ‘static’ frame (call it A) at 1.833 seconds. Except that A can perhaps (somehow) read the clock of B at that moment, but that’s not the issue here.â€
I’ll respond to this point and #6 together.
6. Burt wrote: “In this vaguely stated scenario: B is moving at 0.4c relative to A, one cannot really talk about ‘proper time’, because B can just as well be taken as stationary and then A’s ‘proper time’ must be less than B’s.â€
I’m sorry, this seems to be making a virtue of conundrum. One cannot really talk about proper time? Of course, if B is considered stationary, then one could talk about A’s proper time relative to B. But that’s not the scenario, it is precisely stated that it’s B that is considered to be in motion.
Burt continued: “Proper time is only relevant when you consider specific events in spacetime, but more about that later. The M-diagram actually does a remarkable job in that it shows that A and B are perfectly equivalent. It’s just that if you choose to plot A on orthogonal axes, then B’s axes must be skewed and visa versa.â€
That’s exactly what we’re considering here – two events one at O, the other at two seconds. The “perfect equivalence†where each would observe the same dilation in the other’s time obscures the fact that once A’s event (the observation of B) is fixed at 2 seconds, B’s corresponding observation of A takes place beyond 2 seconds on B’s clock, at 2.18 seconds. Unless that’s done you haven’t shown the mutual relationship, you’ve shown independent observations.
7. Burt wrote that I “seem to have some problem with the term ‘projection of a relationship between world-lines.’ Your statement makes little sense, so I’m afraid I’ll skip this one, except for what I said in 6.â€
A spacetime diagram is a two-dimensional projection of events occurring in four dimensions. I have no problem with that; I can’t imagine what anyone else’s problem would be.
8. Burt quoted me: “…the world-line of B isn’t further along in the temporal component of spacetime according to A’s coordinate system when A is at 2 seconds – B is at 1.833 seconds in A’s coordinate system when A is at 2 seconds.”
Then Burt wrote: “I think this is where your biggest misconception lurks. In my M-diagram the x,t and x’,ct’ axes (call it A and B if you like) are not Euclidean related. Euclidean spacetime would have demanded that dx^2 + dt^2 = constant under a change of inertial coordinates. The relativistic M-diagram demands that |dx^2 – dt^2| = constant under a change of inertial coordinates. This makes a big difference, since this is what relativity is all about. I can show that your ‘alternative diagram’ actually violates this principle, but it will have to wait until this “M-gap” is closed to some extent, otherwise it may prove pointless…â€
I agree that in Minkowski the axes are not Euclidean. But that’s the point of my criticism. I’ll move on to your second comment a little later….
Burt,
Thank you for your comments. I’ll have no time to respond to them until Monday.
Jim
Hi Jim.
Since it does not look like we’ll get anywhere with the Minkowski diagram soon, and since I agree that the Minkowski is not very user-friendly, maybe it’s time to take a look at your diagram and a possible way forward. I took the liberty of annotating Figure 8 of your OP somewhat.
Since special relativity is all about spacetime intervals, let’s consider two events, O at the origin and E at x=0.4, t=1.0 in A’s frame. Now find the coordinates of event E in B’s frame (by simple coordinate rotation): x=-0.56, t=0.92 (rounded to two decimals). To test the relativistic validity of E’s coordinates in B’s frame, we calculate the spacetime interval between O and E in A’s frame as: ds^2 = |dt^2-dx^2| = 1 – .4^2 = 0.84. In B’s frame it works out to be: ds’^2 = 0.92^2 – (-0.56)^2 = 0.53. This is the main flaw in your diagram: a special relativity spacetime diagram must render the spacetime interval invariant under a change of inertial coordinate system. Your diagram clearly does not.
All is not lost, however. There is a ‘magic trick’ that can render your diagram fully relativistic. Simply re-label the two x-axes by swapping their labels, as I’ve shown below in Figure 2. Because of the skew axes, the event is plotted slightly differently, as shown – in blue for A and in red for B. You can easily verify that the spacetime interval between O and E is now the same for A and B. Hence, you now have a fully relativistic spacetime diagram. Loedel first described it in the 1940s and I think it is a great improvement of the 1920s Minkowski diagram in terms of user-friendliness. Sadly, it has not caught on very much…
The modern way of drawing the Loedel diagram is like in Figure 3 below, generalized so that it shows the standard orientation of the light cone. (The original is here: http://www.engineersperspective.com/images/LoedelSpacetimeDiagram1.jpg)
The light cone serves as an “anchor” for the diagram and the two time axes are separated by an angle that depends on their relative speed. When the relative velocity is zero, both time axes will be vertical and when the relative velocity approaches the speed of light, the angle will approach 90 degrees and the time axes will tend towards the light cone.
The scale of all axes is the same and hence it’s very user-friendly. Another benefit of drawing it like this is that only the light cone takes on a ‘privileged’ orientation; the two inertial frames are treated equally and democratically, as it should be. Lastly, Jim, it should please you to know that one can now ‘legitimately’ view progress along the two time axes as spacetime movement. Note that this is not the purpose of the diagram, however: it serves to keep the spacetime intervals between multiple events invariant under a coordinate transformation.
It sounds too good to be true, so where is the catch? As far as I know, the only drawback of the Loedel diagram is that one can only treat two inertial frames at any one time. When you add a third inertial frame, it screws up the symmetry and with it the scale of the third frame so that it is no longer compatible with the rest, i.e., its scale gets ‘funny’, just like the Minkowski diagram’s second inertial frame. This may perhaps explain why Minkowski still rules the relativistic world – since it has one funny scale anyway, one can add as many reference frame with funny scales as you please!
I noticed that http://en.wikipedia.org/wiki/Minkowski_diagram does not make much distinction between the Minkowski and the Loedel diagram anymore. It looks like that article uses whichever suits the situation best and simply call it “Minkowski”, which is probably not strictly correct.
Regards, Burt
Burt,
You wrote: “If you are not prepared to accept the Minkowski diagram’s correctness and are not even prepared to discuss that, it’s totally useless to talk in circles around it.”
You raised a number of issues that are fundamental to the question of the correctness of the Minkowski Diagram. I answered them. I said it’s probably best to delay, not avoid, a further discussion of Minkowski unless and until the other issues are resolved.
It would be circular to discuss a representation without agreeing about the underlying assumptions, wouldn’t it?
Hi Jim. You concluded with: “I can stipulate to your more rigorous statement of the rest of my paragraph. And it’s probably best to delay a further discussion of Minkowski with all these ends still on the loose.”
If you are not prepared to accept the Minkowski diagram’s correctness and are not even prepared to discuss that, it’s totally useless to talk in circles around it. It will also be a waste of time to talk about your ‘alternative diagram’ while there are “loose ends” concerning the perfectly valid Minkowski!
I have actually prepared a short pdf on the problems with your diagram, but since I now also contemplate bowing out of this fruitless discussion, I probably won’t post it in order to avoid creating even bigger circles around the present circles…
Regards, Burt
Burt,
I can appreciate your concern for terminological rigor to some extent, but it can sometimes overshadow the issues. In particular, when terminology is tied to assumptions that are being called in question, the use of that terminology will necessarily deviate to some extent from its prior meaning, and the justification of the deviation rests on the validity of the issue raised, not its fidelity to the old assumptions.
You quote me: “… and motion is measured as more or less time-like, more or less space-like, depending on the magnitude of the relative motion.”
You wrote: “This is not the meaning of “time-like” or “space-like”. Spacetime intervals are time-like, light-like or space-like, depending on the relationship between the time interval and the space interval between events. Please (respectfully asked) try and get the terminology right, otherwise this exchange is going no-where…â€
I’ve shown in my alternative diagram that the “spacetime interval†is actually the proper time of the observed body. I hold it to be one of the advantages of the diagram that it de-mystifies the “intervalâ€, so naturally I’m going to use the terminology differently. If you disagree somehow that my diagram expresses the interval as observed proper time, my use of the terminology stands or falls accordingly.
You quote me: “Then you ask “But who is doing that?†You are doing that when you say simply that light is moving 300,000 km in 1 second.”
You respond: “What I actually wrote: “As I think you understand, light does move 1 ls in 1 second in my frame of reference.”
I will try to quote you more precisely. But my point remains, as I’ll discuss below.
You quote me: “We know by the Lorentz Transformations that at c the clock of a photon doesn’t move, or if you prefer, it records no proper time.”
You wrote: “The Lorentz transformation says no such thing. It says things about particles with mass, nothing about photons. Further, photons do not have clocks! This is an unfortunate popularization and corruption of the real science. Particles that decay may be thought of as having some sort of (statistical) clock. Photons do not decay and hence have no clocks. What you wrote is simply is an extrapolation to the impossible: if a massive particle could move at the speed of light, which it can’t, then hypothetically, it’s “clock would stop”. But it can’t…â€
It follows from the Lorentz Transformation for time (t’ = (t-v)/(1-v2).5) that the proper time of a photon is zero, and while you’re right, of course, that photons don’t have clocks, it is legitimate, and useful (certainly no violation) to say that an imaginary photon-clock would be observed to register no time according to Lorentz. How is it useful? It’s another advantage of the alternative diagram, which illustrates why light is observed to travel 300,000 km/sec from every reference frame, and why it is a limiting speed – based on its conformance with Lorentz. You may be aware of another explanation that doesn’t treat the invariance and limit as mere facts of physics; otherwise explanatory power is supposed to be a fundamental principle of good science, and a basis for its acceptance.
Moving on, you wrote: “we have to say ‘the clock of a body traveling .8c relative to myself will appear to record only .6 seconds for every 1 second of my time.’â€
Respectfully, the clock does move more slowly. As my diagram in figure 9 shows, fully in accord with Lorentz, the relationship is real, relative and mutual.
You wrote: “Then, finally, you messed up your final paragraph somewhat: ‘Another way of expressing it is to say that time, in any given frame of reference, is not absolute [correct so far]…â€
That’s why it’s impermissible, or inadequate, to say “light moves 1 ls in 1 second in my frame of reference.†It’s projecting your time on light (which has no clock!), and thereby treating your time as absolute. A full, relativistic description of the movement of any body has to include both your clock and the moving clock.
I can stipulate to your more rigorous statement of the rest of my paragraph. And it’s probably best to delay a further discussion of Minkowski with all these ends still on the loose.
Hi again Jim, you wrote:
“… and motion is measured as more or less time-like, more or less space-like, depending on the magnitude of the relative motion.”
This is not the meaning of “time-like” or “space-like”. Spacetime intervals are time-like, light-like or space-like, depending on the relationship between the time interval and the space interval between events. Please (respectfully asked) try and get the terminology right, otherwise this exchange is going no-where…
You also wrote: “Then you ask “But who is doing that?†You are doing that when you say simply that light is moving 300,000 km in 1 second.”
What I actually wrote: “As I think you understand, light does move 1 ls in 1 second in my frame of reference.”
Please try and get those quotations right as well, otherwise this exchange is going no-where as well…
Then you said: “We know by the Lorentz Transformations that at c the clock of a photon doesn’t move, or if you prefer, it records no proper time.”
The Lorentz transformation says no such thing. It says things about particles with mass, nothing about photons. Further, photons do not have clocks! This is an unfortunate popularization and corruption of the real science. Particles that decay may be thought of as having some sort of (statistical) clock. Photons do not decay and hence have no clocks. What you wrote is simply is an extrapolation to the impossible: if a massive particle could move at the speed of light, which it can’t, then hypothetically, it’s “clock would stop”. But it can’t…
Well, you’ve almost got this one right: “Taking a less extreme example, instead of saying “a body moving 240,000 km per second is moving .8 ls per second“, relativistically, we have to say “the clock of a body traveling .8c relative to myself will record only .6 seconds for every 1 second of my time.—
If you said it slightly differently, e.g.: “we have to say “the clock of a body traveling .8c relative to myself will appear to record only .6 seconds for every 1 second of my time.—, it would have been right. Remember this: that “body traveling .8c relative to myself” would also reckon that my clock appears to record only .6 seconds for every 1 second of its time…
Then, finally, you messed up your final paragraph somewhat: “Another way of expressing it is to say that time, in any given frame of reference, is not absolute [correct so far]; it varies according to the relative motion of other bodies, [wrong!] and in fact any body in relative motion in a given reference frame will be observed to record less time than the observer whose frame of reference it is [correct, but very loosely stated – the more rigorous way would be: “an observer present at two events would record a smaller time interval between the two events than any observer not present at the same two events”. There is a big difference between the two statements – the one is absolute, the other one is relative and the inverse is also true.]”.
With all this said, I saw nothing in what you wrote here that strengthened your position about the Minkowski diagram that is “in error” – in fact Minkowski comes out stronger with most of what you wrote.:-) My plea to you is this: try to understand the Minkowski spacetime diagram properly, and then we can tackle the alternatives. Otherwise, it’s just going to go in circles. :-(
Regards, Burt or Jorrie, doesn’t matter…
Hi Jim, here is a (more or less) point-by-point reply to your post. I’ve numbered my replies so that it is easier to reference them later.
You wrote: “I don’t know how to emphasize it more clearly: The Minkowski diagram is meant to illustrate the relationship between world-lines as they move in spacetime.”
1. That was a secondary purpose: the main purpose was to show how the speed of light and the spacetime interval ds^2 = |dx^2 – dt^2| remain constant under change of inertial frame of reference. That’s what special relativity is about.
Jim wrote: “A relativistic representation of world-lines has to be based on one frame of reference, one coordinate system, …”
2. There are always two inertial frames involved on a Minkowski spacetime diagram – one can call one the reference frame and the other the moving frame, but there are two frames, as per my 1 above.
Jim wrote: “… and has to project, at minimum, the perspective of that frame of reference.”
3. The Minkowski diagram actually portrays both frames’ perspective, more specifically, it gives those “physical laws [that] might find their most perfect expressionâ€, i.e., the invariance of the speed of light and the spacetime interval in both frames.
Jim wrote: “That is where the Minkowski diagram fails – it is a distortion of the four-dimensional relationship between bodies moving in spacetime.”
4. Actually, it shows the (two)-dimensional relationship between bodies moving in spacetime pretty accurately if you read the diagram as designed. It is possible that you have a “distorted view” of that relationship, maybe because you are sticking to Euclid’s geometry. I have sympathy with this, because I started out more or less the same as you – a very similar diagram of my own that eventually proved to be fatally flawed…
Jim wrote: “Referring to your excellent diagram, nothing actually happens on the world-line of the observer in the ‘static’ frame (call in A) at 1.833 seconds.”
5. Firstly, thanks! Yea, I agree: nothing actually happens on the world line of the observer in the ‘static’ frame (call it A) at 1.833 seconds. Except that A can perhaps (somehow) read the clock of B at that moment, but that’s not the issue here.
Jim continued: “That’s the proper time [1.833 seconds] of the moving frame (call it B) when A is at 2 seconds.”
6. Not quite. In this vaguely stated scenario: B is moving at 0.4c relative to A, one cannot really talk about ‘proper time’, because B can just as well be taken as stationary and then A’s ‘proper time’ must be less than B’s. Proper time is only relevant when you consider specific events in spacetime, but more about that later. The M-diagram actually does a remarkable job in that it shows that A and B are perfectly equivalent. It’s just that if you choose to plot A on orthogonal axes, then B’s axes must be skewed and visa versa.
Jim wrote: “Remember, this is supposed to be a 2-dimensional projection of a 4-dimensional relationship between world-lines. The temporal ordinate 1.833 is A’s measure of B’s clock, and B’s clock is on B’s world-line, not A’s.”
7. Jim, you seem to have some problem with the term “projection of a relationship between world-lines.” Your statement makes little sense, so I’m afraid I’ll skip this one, except for what I said in 6.
Jim wrote: “Furthermore, the world-line of B isn’t further along in the temporal component of spacetime according to A’s coordinate system when A is at 2 seconds – B is at 1.833 seconds in A’s coordinate system when A is at 2 seconds.”
8. I think this is where your biggest misconception lurks. In my M-diagram the x,t and x’,ct’ axes (call it A and B if you like) are not Euclidean related. Euclidean spacetime would have demanded that dx^2 + dt^2 = constant under a change of inertial coordinates. The relativistic M-diagram demands that |dx^2 – dt^2| = constant under a change of inertial coordinates. This makes a big difference, since this is what relativity is all about. I can show that your ‘alternative diagram’ actually violates this principle, but it will have to wait until this “M-gap” is closed to some extent, otherwise it may prove pointless…
Regards, Burt
Burt (Jorrie?)
You wrote: “I think it will help if we stick to more standard terms, e.g., “move” means movement in space. Clocks move in space and they record proper time. It is confusing to say: ‘clocks move in time’.â€
It has to be progress when we begin to isolate the places where we disagree, the places where we can improve our terminology, and the places where we benefit from clarification.
In this instance I believe I am the conventional one in saying that spacetime being a continuum, motion in space and motion in time are both forms of motion, and motion is measured as more or less time-like, more or less space-like, depending on the magnitude of the relative motion. Maybe we can agree that clocks record proper time as we observe them to move, or not, in space, and as we observe them to move, or not, in time.
You quote me: “To construct a geometric representation of a relativistic relationship, given that time is relative, you can’t legitimately project your clock upon another body. It’s meaningless, it contradicts the actual observation you would have if you could monitor a moving clock.”
Then you ask “But who is doing that?†You are doing that when you say simply that light is moving 300,000 km in 1 second. We know by the Lorentz Transformations that at c the clock of a photon doesn’t move, or if you prefer, it records no proper time. Without getting into the merits of the Minkowski diagram (yet), I hope you’ll agree that to describe the event relativistically, we have to say “a photon travels 300,000 km in 1 second by my clock but 0 seconds by the photon’s clock.†Taking a less extreme example, instead of saying “a body moving 240,000 km per second is moving .8 ls per second“, relativistically, we have to say “the clock of a body traveling .8c relative to myself will record only .6 seconds for every 1 second of my time.â€
Another way of expressing it is to say that time, in any given frame of reference, is not absolute; it varies according to the relative motion of other bodies, and in fact any body in relative motion in a given reference frame will be observed to record less time than the observer whose frame of reference it is.
Hi Jim.
You wrote: “If you are moving at .8c relative to Fred, who considers himself to be resting and relaxing, he will measure your clock as moving .6 seconds in 1 second of his time.”
I think it will help if we stick to more standard terms, e.g., “move” means movement in space. Clocks move in space and they record proper time. It is confusing to say: “clocks move in time”. With that corrected, what you wrote is technically correct up to a point. This is also precisely what the Minkowski spacetime diagram portrays, if used correctly. It is real “relativistic relativity”
Then you wrote: “To construct a geometric representation of a relativistic relationship, given that time is relative, you can’t legitimately project your clock upon another body. It’s meaningless, it contradicts the actual observation you would have if you could monitor a moving clock.”
But who is doing that? Fred and myself each have our own coordinate system in which we measure distances and the passage of time. In order to portray them on the same diagram, we have to skew either Fred’s or my coordinate system (or both). We then read off the parameters of a spacetime event by dropping lines parallel to our own two axes onto our own coordinates respectively. If we don’t do that, we will fall foul of exactly what you warned against above: “you can’t legitimately project your clock upon another body”, or perhaps better stated: ‘you can’t project your clock’s time reading or its position onto the other observer’s coordinates’. The Minkowski spacetime diagram never does that – if you do it, you are using it incorrectly.
I hope we can first agree upon the correct usage of the Minkowski diagram and then think about alternative ways of representing the same facts – there are many, some better than others, but mostly workable.
Regards, Jorrie
Burt,
You can’t begin to consider my position until you allow, just for a moment, that maybe my issue doesn’t stem from a lack of understanding.
Let’s go back to 1908. Minkowski constructed a geometric diagram so that “physical laws might find their most perfect expression†in a two-dimensional graphic projection of the relationship between bodies moving in four-dimensional spacetime. He recognized that SR had revealed spacetime to be a continuum, and he wanted to illustrate how world-lines move relative to each other in spacetime. I don’t know how to emphasize it more clearly: The Minkowski diagram is meant to illustrate the relationship between world-lines as they move in spacetime.
A relativistic representation of world-lines has to be based on one frame of reference, one coordinate system, and has to project, at minimum, the perspective of that frame of reference. That is where the Minkowski diagram fails – it is a distortion of the four-dimensional relationship between bodies moving in spacetime.
Burt, you can bluster about how this discussion is pointless, how I obviously don’t understand the diagram (because you believe diagram is unquestionable), or you can read my argument openly and carefully.
Referring to your excellent diagram, nothing actually happens on the world-line of the observer in the ‘static’ frame (call in A) at 1.833 seconds. That’s the proper time of the moving frame (call it B) when A is at 2 seconds. Remember, this is supposed to be a 2-dimensional projection of a 4-dimensional relationship between world-lines. The temporal ordinate 1.833 is A’s measure of B’s clock, and B’s clock is on B’s world-line, not A’s. Again, it’s supposed to be a 2-dimensional projection of a 4-dimensional relationship between world-lines.
Furthermore, the world-line of B isn’t further along in the temporal component of spacetime according to A’s coordinate system when A is at 2 seconds – B is at 1.833 seconds in A’s coordinate system when A is at 2 seconds. Draw a line parallel to the x-axis at A’s measure of 1.833 seconds, and that’s where B’s clock is when A’s clock is at 2 seconds – that’s where A observes B’s clock to be. Again, I don’t know how I might state it more clearly, B is at 1.833 seconds in A’s orthogonal coordinate system when A is at 2 seconds. A two-dimensional projection of the four-dimensional relationship must show B’s world-line at 1.833 seconds in A’s coordinate system when A’s world-line is at 2 seconds.
Therefore, the M-diagram is not, as intended, a two-dimensional projection of spacetime relationships between world-lines. Beginning with the light-cones, it improperly projects the clock of the ‘static’ observer on bodies in relative motion, then compensates by connecting what should be Euclidean coordinates in a non-Euclidean manner. That’s why it’s necessary to draw non-parallel lines between observations in the M-diagram, that’s why a plot of coordinates according to various world-lines is parabolic in the M-diagram, not Euclidean as they are in actuality. That’s why the M-diagram is flawed, and leads to mistaken conclusions about spacetime.
I understand your drawing of the Minkowski diagram. You’ve done an excellent job. But the Minkowski diagram fails to project spacetime relationships in two dimensions.
Hi Jim.
You opened with: “Well, of course, I’ve pointed out that the Minkowski diagram projects the observer’s local time upon the observer’s world line.”
Who taught you this nonsense? To clarify, I’ve annotated the Minkowski diagram that I referenced earlier a bit more and succeeded to post it here directly. If it somehow does not show, it is here: http://www.engineersperspective.com/images/Minkowski3.jpg
The black bullets indicate the scale of the ‘static’ frame x,ct. The red bullets indicate the scale of the moving frame x’,ct’, which moves at v=0.4c relative to the static frame. If you correctly ‘project’ the moving frame onto the static frame, you get the time dilation and Lorentz contraction as expected for v=0.4c, e.g., the static frame observes that 0.917 seconds elapse in the moving frame for every one second of static frame time. Ditto for length contraction, as shown.
For both of these frames, light moves along a line at + and – 45 degrees slope on the reference frame (not shown), so both frames measure the speed of light as isotropic and equal to c. Further, the spacetime interval |(cdt)^2 – dx^2| is preserved in both frames of reference.
This is the correct use and interpretation of the Minkowski spacetime diagram. Now please Jim, ask questions about this diagram until you understand it fully – then we can move onto alternatives. (Sorry to sound pedagogical, but I do not know any other way forward here…)
Regards, Burt
Burt,
Well, of course, I’ve pointed out that the Minkowski diagram projects the observer’s local time upon the observed’s world line. Seems like a relativistic no-no to me.
Your reference to a petition signed by Nazi scientists to discredit a heretical physicist and a hated Jew is ironic in view of your point that “no technical refutation of [the M. Diagram’s] validity has ever survived in a century of scrutiny.” Much like the petitioners, you’re trying to pile a hundred redundancies on a weightless scale. So no, a hundred years means nothing to me. This could be the year!
BTW, I’d very much like to see your critique of my diagram, which puts us in a curious situation. A confident critic shy of sharing his superior knowledge, a vulnerable writer welcoming what might be a devastating refutation. Please, don’t let your effort be unfulfilled, for the thousands of readers of this thread if not for me!
Jim
Burt,
Thank you for your thoughtful reply.
You wrote: “As I think you understand, light does move 1 ls in 1 second in my frame of reference; hence, if I use orthogonal x and ct axes, it moves at a 45-degree slope on it (not at 90 degree slope as you apparently propose).â€
Here is where we may begin to differ, although not, I believe, if we both consider it carefully:
If you are moving at .8c relative to Fred, who considers himself to be resting and relaxing, he will measure your clock as moving .6 seconds in 1 second of his time. He might say that you’re moving .8 ls per second, but a more complete (and relativistic) description would be to say that you’re moving .8 ls in 1 second of his time and .6 seconds of his measure of your time. You’re not moving 1 second relative to Fred, according to Fred. You’re moving .6 seconds as he moves 1 second. (And of course you could just as legitimately say he’s moving .8 ls relative to you, with a corresponding dilation of his time.) Time is entirely relative. You can’t project your clock upon another body. The more a body moves in space relative to you, the less it moves in time relative to you.
To construct a geometric representation of a relativistic relationship, given that time is relative, you can’t legitimately project your clock upon another body. It’s meaningless, it contradicts the actual observation you would have if you could monitor a moving clock.
We don’t disagree on this much, do we?
Jim,
Even though you acknowledge your boorish behavior, I’ll stay out of this discussion and not respond to any future postings of yours.
Burt is approaching this from a different angle, and perhaps you will finally figure out what I was trying to explain when I said you seem to have a fundamental misunderstanding of the meaning of the term “frame of reference.”
Have you considered looking at my discussion of special and general relativity in phenomenological rather than mathematical terms in my recent Physics: Decade by Decade in the Facts On File Twentieth-Century Science set?
Before you get all wrapped up in the mathematics of Minkowski diagrams, perhaps you need a phenomenological understanding, which is the way I’ve been working this issue in our discussions (which are now ended).
Signing off from jarnold’s blog for good,
Fred Bortz
Science and technology books for young readers (www.fredbortz.com)
and Science book reviews (www.scienceshelf.com)
Hi Jim (edit: sorry, I confused names first time around; this reply is to jarnold.)
OK, since it looks like you are misunderstanding Minkowski spacetime diagrams, I’ll have to go into your premise about the movement of light in some detail.
You wrote: “To project the world-line of light as moving 1 ls in 1 second has no relativistic validity. Light doesn’t move in time by any legitimate, relativistic projection. Of what value is a geometric projection that treats time as an absolute?”
As I think you understand, light does move 1 ls in 1 second in my frame of reference; hence, if I use orthogonal x and ct axes, it moves at a 45-degree slope on it (not at 90 degree slope as you apparently propose). When I time light one-way, it takes time to get from here to there. Now let’s say Fred is an observer moving at v = 0.6c relative to me. He takes more time to get from here to there, so if I plot that on my grid, he moves at a slope of about 59 degrees on it. This is his time axis, ct’. Fred’s space axis (x’) lies at a slope of about 31 degrees on my grid, with light still perfectly symmetrical between the two. But this you all know, because that’s in your Figure 1 of the OP. I’m giving it here for those who perhaps don’t know. What I think you miss is this: whatever my calibration of Fred’s x’ and ct’ axes, it still shows light to move one ls in one second relative to him, since the calibration of his x’ and ct’ scales are the same (different to mine, but that’s irrelevant here).
Now onto your problem with (quote): “The clock of a photon moves 0 seconds according to my measure.” This is not an exactly valid statement, but it will need more than a comment post to explain. What is valid is that in my frame, the clock of a massive particle that moves at close to the speed of light seems to tick very much slower than my clock (and slower than Fred’s clock, for that matter). If I draw the x’ and ct’ axes of that particle on my Minkowski diagram, they will both tend to coincide with the path of light. However, in the x’ and ct’ frame of that particle, light still moves at one ls in one second, no matter how close that particle moves to the speed of light. You just have to scale both the x’ and the ct’ axis the same…
Minkowski spacetime diagrams treat all of the above perfectly well. It also shows (contrary to a claim that you made in this thread) time dilation and Lorentz contraction perfectly. I’ve posted a diagram illustrating this here: http://www.engineersperspective.com/images/Minkowski-dilation-contraction.jpg
It comes from a book I wrote on relativity for engineers. I do not know how to post graphics here.
If we can more or less agree on the above points, it may actually be fruitful to continue this discussion in public. Otherwise, we’ll have to see…
Regards, Burt
Fred,
I’m sorry you feel insulted. I just hope my boorish behavior will not prevent someone (you or Burt, ideally) from explaining what exactly it is that I don’t understand.
I’m sorry you have decided to resort to insults when I was trying to help you at your explicit request for my critique.
Here are the key paragraphs from my most recent posting. They were based on my experience as an author and did not address the possible scientific issues with your paper.
“…As a writer, when I find a particular piece of work is being turned down without comment by numerous editors, I recognize that, whether I am right or wrong in what I’m saying, I am not communicating to my intended audience.
“I think that’s where you are at this point….”
Too bad you would rather attack a mild criticism than look for ways to revise your work.
I’m done responding to you.
Fred Bortz — Science and technology books for young readers (www.fredbortz.com) and Science book reviews (www.scienceshelf.com)
Jim writes:
“I’d like you to consider that by presuming a contrary thesis is based on a lack of understanding, you make it unlikely that you’ll be able to recognize and directly address a valid point if a valid point is there to be recognized and addressed.”
I’m afraid you’ve got it backwards, Jim.
I started out by presuming your posts had something interesting to offer, but our discussions led me to question the depth of your understanding.
That’s why I decided to get off the merry-go-round we were on before and why I am not getting back on it here.
As a writer, when I find a particular piece of work is being turned down without comment by numerous editors, I recognize that, whether I am right or wrong in what I’m saying, I am not communicating to my intended audience.
I think that’s where you are at this point. Don’t blame us for not understanding what you think is novel and important. The problem is in the article itself.
Our impression, based on your writing, is that you don’t have anything new (my initial reaction) and that you are misunderstanding (Burt’s detailed replies).
Based on your postings and having given you the benefit of the doubt more than once, Burt and I agree that you seem to be stuck in an incorrect assumption.
You asked for our impressions about why editors are turning this down without comment, but you seem to be unwilling to accept our conclusions.
My final attempt to help you is this:
It’s time to for you to revise your article based on our responses and the responses of editors, or to give up trying to publish it.
Fred Bortz — Science and technology books for young readers (www.fredbortz.com) and Science book reviews (www.scienceshelf.com)
Burt and Fred,
I’d like you to consider that by presuming a contrary thesis is based on a lack of understanding, you make it unlikely that you’ll be able to recognize and directly address a valid point if a valid point is there to be recognized and addressed.
And I’d like you to note that I’m going to address Burt’s point directly, without questioning whether he is familiar with the tenets of relativity.
“A Minkowski diagram’s light is also moving at one ls in one second in every other inertial frame of reference that you care to choose…. You may not like that step, but that does not make the Minkowski spacetime diagram ‘un-relativistic’, or wrong, as you seem to hold.â€
I don’t question your understanding of relativity, I’m sure you realize that light travels 1 ls in my measure of space in 1 second of my measure of time. But of course my measures are not absolute, they are relative. The photon moves 1 ls according to my measure. The clock of a photon moves 0 seconds according to my measure. And I’m sure you realize that light moves 0 seconds in time, not 1 second in time when measured “in every other inertial frame of reference that you care to choose.†Your statement is no doubt in error, not in ignorance, so rather than dismiss it I am addressing it. Pre-relativity, the 1 second measure is a universal; post-relativity, the 1 second measure is only the measure of clocks sharing my frame of reference. To draw a world-line of a body in relative motion in such a way that its motion in time is the projection of the observer’s motion in time is pre-relativistic. That’s what the Minkowski diagram does, that’s what the light cones represent.
“you are measuring a time interval t’ in a direction parallel to the t axis (as you indicated in figure your 7). In geometrical relativity, this is invalid.â€
If what you call “geometric relativity†is to be congruent with what I suppose I should call, by contrast, relativistic relativity, when I measure the time interval t’ I am observing the clock of the body moving relative to mine. In my representation of a spacetime diagram that measure is precisely the measure I would have in relativistic relativity. In my figure 7 it is 3 seconds; in Special Relativity it is 3 seconds. In the Minkowski diagram the measure of a body’s movement in time is the projection of my clock as an absolute universal measure.
To project the world-line of light as moving 1 ls in 1 second has no relativistic validity. Light doesn’t move in time by any legitimate, relativistic projection. Of what value is a geometric projection that treats time as an absolute? I think we both know, and understand, the answer.
Fred,
You began your contribution to this thread by saying you’re not qualified to judge my criticism of the Minkowski diagram. Then Burt objected that I don’t understand Minkowski without addressing my basic point – that light doesn’t move 1 ls in 1 second as the diagram represents, it moves 0 seconds relative to an observer’s 1 second. He’s yet to correct his counter-claim that “light [moves] at one ls in one second in every… inertial frame of reference that you care to chooseâ€, but I have to believe he would, if he were to address my basic issue. He’s said my criticisms are misrepresentations, and my alternative is inferior or invalid, all based on the presumption that Minkowski is valid. I’ve raised a simple point on a well-recognized, widely understood tenet of relativity, and he’s responded, in effect, that a criticism needn’t be directly addressed because a knowledgeable person would understand that a valid diagram can’t be invalid.
You may find Burt’s defense compelling, it seems to have given you a newfound qualification to pass judgment without any more contribution of your own except to say “yeah, what he said.†I need more to be persuaded – specifically, a defense that doesn’t presume the issue in question.
You’ve come to the comfortable conclusion that my paper can’t be worthwhile because it hasn’t been treated as worthwhile, and you’ve concluded that it’s rightly been dismissed without comment by dismissing it as unworthy of substantive comment.
You accuse me of not understanding physics. It seems to me you don’t understand irony. Your reaction to my thesis has been a poster-boy example of what you refuse to believe, that a challenge to convention can be summarily rejected regardless of its merit.
Dear Jim,
I think Burt is making, with more clarity, the same points I was trying to explain in our earlier go-rounds.
You seem to be stuck in a misinterpretation or misunderstanding that is leading you in unproductive directions. This is not a personal attack but a judgment based on reading numerous postings that you have made here, including our earlier discussions.
As long as you insist that you are right and that everyone else (including numerous journal editors) seems to be misunderstanding your ideas–and that those people are unwilling to look at challenges to the accepted science–I’m afraid you won’t make any progress.
The kind of challenges you are making require persuading your readers that you understand the theory or approach you are challenging in depth. Your writings leave me with considerable concern that you are not understanding the theories you challenge.
Rather than get back on the old merry-go-round with you, I’ll leave it at this.
Respectfully,
Fred Bortz
Science and technology books for young readers (www.fredbortz.com)
and Science book reviews (www.scienceshelf.com)
Hi again Jim.
You wrote: “You raised a number of issues that are fundamental to the question of the correctness of the Minkowski Diagram. I answered them.”
I think I simply answered your issues with the Minkowski diagram – I have no issues with it and certainly would not raise any…
You have not brought a single valid criticism of the Minkowski spacetime diagram to the table. As a matter of fact, there are a few valid criticisms in terms of its user-friendliness, but no technical refutation of its validity has ever survived in a century of scrutiny. Does that not tell you something?
So stop beating around the bush – come up with a ‘flaw’ in the Minkowski spacetime diagram’s validity that will stand scrutiny by the world![1] You better make sure that it is relativistically correct, otherwise you may be crucified. :-(
Regards, Burt
Note [1]: It reminds me about the journalist that asked Einstein his reaction to a petition (I think) that was titled “A Hundred Against Einstein”. He replied: “Why a hundred? One is enough!”