A group of researchers has developed a robot called an ornithopter that can land on a branch like a bird.
The ornithopter was developed in Spain as part of the European project GRIFFIN and weighs 700 grams. It is able to land on a branch without any external commands and has the potential to carry out tasks, like collecting samples from a tree or landing on artificial structures. It could also potentially be used for long-range missions because it has the ability to recharge using solar energy.
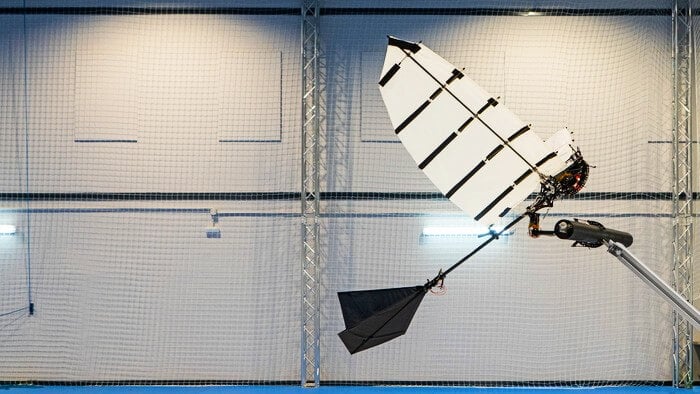
The ornithopter has a computer and navigation system on board and uses an external motion-capture system to determine its position. It also has a leg-claw appendage that is finely calibrated to grasp the branch and absorb the robot’s forward momentum upon impact. The researchers were able to replicate their results by building two ornithopters. In the future, they hope to increase the robot’s autonomy and test it in a more unpredictable outdoor environment.
“This is the first phase of a larger project. Once an ornithopter can master landing autonomously on a tree branch, then it has the potential to carry out specific tasks, such as unobtrusively collecting biological samples or measurements from a tree. Eventually, it could even land on artificial structures, which could open up further areas of application,” said Raphael Zufferey, a postdoctoral fellow in the Laboratory of Intelligent Systems (LIS) and Biorobotics ab (BioRob) in the EPFL School of Engineering.
Landing an ornithopter on a perch without any external commands required the researchers to manage many factors that nature has already perfectly balanced. The ornithopter had to be able to slow down significantly as it perched, while still maintaining flight. The claw needed to be strong enough to grasp the perch and support the weight of the robot, without being too heavy to be held aloft. The robot also needed to be able to perceive its environment and the perch in front of it in relation to its own position, speed, and trajectory.
The researchers were able to solve these problems by equipping the ornithopter with a computer and navigation system on board and using an external motion-capture system to help it determine its position. The ornithopter’s leg-claw appendage was finely calibrated to compensate for the up-and-down oscillations of flight as it tried to grasp the perch. The claw itself was designed to absorb the robot’s forward momentum upon impact and close quickly and firmly to support its weight. Once perched, the robot remains on the perch without using any energy.
Even with all these factors to consider, the researchers were successful in building two claw-footed ornithopters that could replicate their perching results. In the future, they hope to improve the device and increase its autonomy so that it can perform perching and manipulation tasks outdoors in a more unpredictable environment.
ScienceBlog.com has no paywalls, no sponsored content, and no agenda beyond getting the science right. Every story here is written to inform, not to impress an advertiser or push a point of view.
Good science journalism takes time — reading the papers, checking the claims, finding researchers who can put findings in context. We do that work because we think it matters.
If you find this site useful, consider supporting it with a donation. Even a few dollars a month helps keep the coverage independent and free for everyone.