In a remarkable stride forward in robotics, a team of scientists from the Department of Mechanical Science and Bioengineering at Osaka University has crafted a pioneering walking robot, demonstrating an innovative use of dynamic instability for navigation.
By modulating the flexibility of its couplings, the robot demonstrates a capacity for self-directed turns, avoiding the need for intricate computational control mechanisms. This pioneering effort has promising implications for the development of rescue robots that can traverse challenging terrains.
The extraordinary agility exhibited by most animals on our planet, who use legged locomotion systems to navigate diverse environments, is a marvel of evolutionary engineering. Yet, attempts by human engineers to replicate this method of movement have been met with a somewhat disheartening realisation: legged robots are alarmingly delicate. A single leg failure, attributable to recurrent stress, can severely hinder these robots’ operational capabilities. Additionally, the computational power needed to control numerous joints for traversing complex environments is substantial. Therefore, enhancements to this design could significantly benefit the development of autonomous or semi-autonomous robots, potentially deployed as exploration or rescue vehicles in perilous areas.
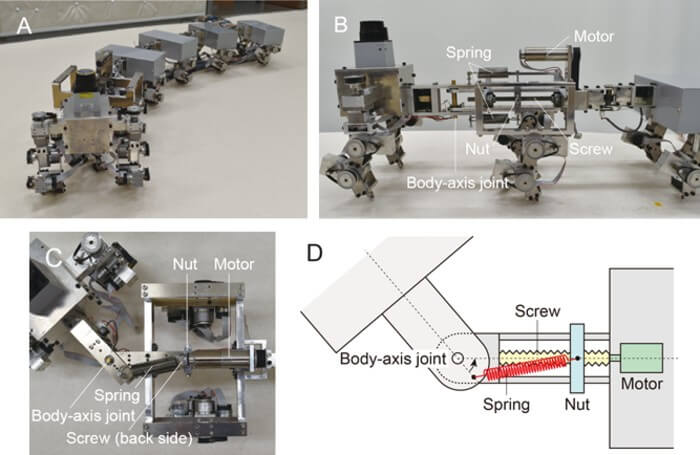
In a groundbreaking development, researchers from Osaka University have fashioned a biomimetic “myriapod” robot that manipulates a natural instability to transition from linear to curved movement. Their study, recently published in Soft Robotics, describes this inventive robot, composed of six segments (each connected to a pair of legs) and flexible joints. The flexibility of these couplings can be adjusted mid-motion using motors and an adjustable screw. The scientists demonstrated that heightened flexibility in the joints induced a phenomenon known as a “pitchfork bifurcation”, wherein linear walking becomes unstable, and the robot instead transitions to a curved pattern of movement. Whilst instability is typically a characteristic engineers strive to avoid, the controlled harnessing of it can facilitate efficient maneuverability.
“We were inspired by the ability of certain extremely agile insects that allows them to control the dynamic instability in their own motion to induce quick movement changes,” said Shinya Aoi, an author of the study. This innovative method bypasses the need for direct body-axis movement control, substantially reducing both computational complexity and energy requirements.
Upon testing the robot’s navigational abilities, the researchers discovered that the robot could effectively manoeuvre towards specified locations by adopting a curved trajectory. “We can foresee applications in a wide variety of scenarios, such as search and rescue, working in hazardous environments or exploration on other planets,” envisions Mau Adachi, another author of the study. Subsequent models may incorporate additional segments and control mechanisms.
The paper, entitled “Maneuverable and efficient locomotion of a myriapod robot with variable body-axis flexibility via instability and bifurcation,” was published in Soft Robotics and is available at DOI: https://doi.org/10.1089/soro.2022.0177.