Compared to robots, human bodies are flexible, capable of fine movements, and can convert energy efficiently into movement. Drawing inspiration from human gait, researchers from Japan crafted a two-legged biohybrid robot by combining muscle tissues and artificial materials. Publishing on January 26 in the journal Matter, this method allows the robot to walk and pivot.
“Research on biohybrid robots, which are a fusion of biology and mechanics, is recently attracting attention as a new field of robotics featuring biological function,” says corresponding author Shoji Takeuchi of the University of Tokyo, Japan. “Using muscle as actuators allows us to build a compact robot and achieve efficient, silent movements with a soft touch.”
The research team’s two-legged robot, an innovative bipedal design, builds on the legacy of biohybrid robots that take advantage of muscles. Muscle tissues have driven biohybrid robots to crawl and swim straight forward and make turns—but not sharp ones. Yet, being able to pivot and make sharp turns is an essential feature for robots to avoid obstacles.
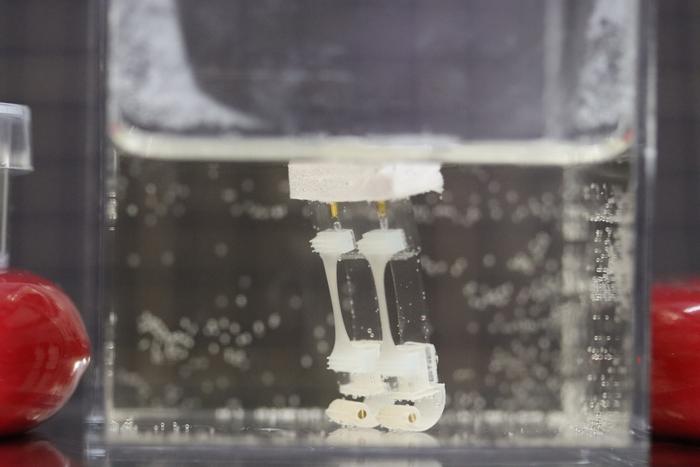
To build a nimbler robot with fine and delicate movements, the researchers designed a biohybrid robot that mimics human gait and operates in water. The robot has a foam buoy top and weighted legs to help it stand straight underwater. The skeleton of the robot is mainly made from silicone rubber that can bend and flex to conform to muscle movements. The researchers then attached strips of lab-grown skeletal muscle tissues to the silicone rubber and each leg.
When the researchers zapped the muscle tissue with electricity, the muscle contracted, lifting the leg up. The heel of the leg then landed forward when the electricity dissipated. By alternating the electric stimulation between the left and right leg every 5 seconds, the biohybrid robot successfully “walked” at the speed of 5.4 mm/min (0.002 mph). To turn, researchers repeatedly zapped the right leg every 5 seconds while the left leg served as an anchor. The robot made a 90-degree left turn in 62 seconds. The findings showed that the muscle-driven bipedal robot can walk, stop, and make fine-tuned turning motions.
“Currently, we are manually moving a pair of electrodes to apply an electric field individually to the legs, which takes time,” says Takeuchi. “In the future, by integrating the electrodes into the robot, we expect to increase the speed more efficiently.”
The team also plans to give joints and thicker muscle tissues to the bipedal robot to enable more sophisticated and powerful movements. But before upgrading the robot with more biological components, Takeuchi says the team will have to integrate a nutrient supply system to sustain the living tissues and device structures that allow the robot to operate in the air.
“A cheer broke out during our regular lab meeting when we saw the robot successfully walk on the video,” says Takeuchi. “Though they might seem like small steps, they are, in fact, giant leaps forward for the biohybrid robots.”
