Scientists at the University of Bristol have made significant progress in developing teleoperated robots for gathering moon dust, bringing us one step closer to efficient lunar resource extraction.
Summary: Researchers have successfully demonstrated a virtual simulation system that can control physical robots to collect lunar regolith samples, potentially revolutionizing future moon missions and resource extraction efforts.
Estimated reading time: 4 minutes
In a groundbreaking study, researchers at the University of Bristol have successfully developed a virtual simulation system that can control physical robots to collect lunar regolith samples. This advancement could play a crucial role in future moon missions and lunar resource extraction efforts.
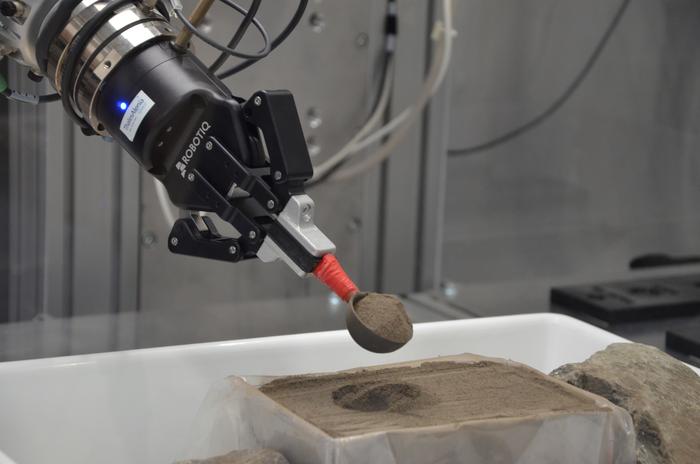
The team, led by Joe Louca from Bristol’s School of Engineering Mathematics and Technology and the Bristol Robotics Laboratory, demonstrated that operators could complete a sample collection task by controlling a virtual simulation, which then sent commands to a physical robot to mirror the simulation’s actions.
Overcoming Lunar Challenges
One of the key advantages of this system is its ability to operate without needing physical camera streams, making it particularly useful for delayed teleoperation on the Moon. This is crucial given the communication delays between Earth and the Moon, which can complicate real-time robot control.
Louca explained the potential applications of this technology:
“One option could be to have astronauts use this simulation to prepare for upcoming lunar exploration missions. We can adjust how strong gravity is in this model, and provide haptic feedback, so we could give astronauts a sense of how Moon dust would feel and behave in lunar conditions – which has a sixth of the gravitational pull of the Earth’s. This simulation could also help us to operate lunar robots remotely from Earth, avoiding the problem of signal delays.”
The importance of this development becomes clear when considering the challenges posed by lunar regolith. Moon dust is notoriously difficult to work with due to its sticky and abrasive nature, and it behaves differently under the Moon’s reduced gravity.
Democratizing Lunar Robotics Development
Another significant benefit of this virtual simulation is its potential to reduce barriers to entry for lunar robotics development. Instead of requiring expensive artificial moon dust simulants or specialized facilities, researchers and engineers could use this simulation for initial testing of their systems.
This democratization of lunar robotics development could accelerate innovation in the field, potentially leading to more rapid advancements in lunar exploration and resource extraction technologies.
Promising Results and Future Directions
The team’s initial results are highly encouraging. Louca reported:
“The model predicted the outcome of a regolith simulant scooping task with sufficient accuracy to be considered effective and trustworthy 100% and 92.5% of the time.”
However, the researchers acknowledge that technical effectiveness is only part of the equation. They plan to investigate how human operators respond to this system when controlling a robot with several seconds of delay, addressing potential non-technical barriers such as operator trust in the system.
Implications for Future Lunar Missions
The timing of this research is particularly relevant given the numerous lunar missions planned for the coming decade. Louca highlighted the potential applications:
“In the next decade we’re going to see several crewed and uncrewed missions to the Moon, such as NASA’s Artemis program and China’s Chang’e program. This simulation could be a valuable tool to support preparation or operation for these missions.”
As space agencies and private companies increasingly focus on lunar resource extraction, including oxygen and water from regolith, this simulation tool could play a crucial role in developing and testing the necessary technologies.
The research, conducted at the European Space Agency’s European Centre for Space Applications and Telecommunications site in Harwell, represents a significant step forward in our ability to operate effectively on the lunar surface. As we continue to push the boundaries of space exploration, innovations like this virtual simulation system will be key to overcoming the unique challenges of working in extraterrestrial environments.
Quiz
- What is the main advantage of the virtual simulation system developed by the University of Bristol researchers? a) It can operate without needing physical camera streams b) It can create artificial moon dust c) It can transport actual moon dust to Earth d) It can simulate Earth’s gravity on the Moon
- How accurate was the model in predicting the outcome of a regolith simulant scooping task? a) 50% of the time b) 75% of the time c) 92.5% of the time d) 100% of the time
- What is one of the challenges of working with lunar regolith? a) It’s too soft b) It’s radioactive c) It’s sticky and abrasive d) It’s too heavy
Answers:
- a
- c
- c
Glossary of Terms
- Lunar regolith: The layer of loose, fragmented material covering the solid rock of the Moon’s surface.
- Teleoperation: The operation of a machine or system from a distance.
- Haptic feedback: Tactile sensations created by a device to provide information to the user.
- Simulant: An artificial material designed to mimic the properties of lunar regolith for testing purposes.
- Artemis program: NASA’s current program to return humans to the Moon.
- Chang’e program: China’s lunar exploration program.
Enjoy this story? Get our newsletter! https://scienceblog.substack.com/
