An elephant’s trunk contains roughly 40,000 individual muscle segments, each capable of contracting independently, which is how the animal can crack open a watermelon and then, thirty seconds later, pick up a single peanut from the ground. Plant tendrils do something structurally similar: when a cucumber vine touches a support, specialised cells on one side of the tendril lignify and stiffen while cells on the other side stay soft, and the resulting asymmetry causes the whole structure to coil into a tight spring within hours. The filament is the machine. Its shape change isn’t triggered by a separate actuator or a central nervous system; the behaviour is written directly into the material’s internal architecture, at the level of individual cells. For engineers trying to build soft robots, prosthetics, and adaptive filters, this has been the maddening part: replicating a motion is easy enough, but encoding the motion into the matter itself is something else entirely.
A team at Harvard has now done something close to that. Using a printing technique that rotates its nozzle as it deposits material, they’ve fabricated hair-fine synthetic filaments whose bending, twisting, and coiling behaviour is programmed during fabrication, requiring no separate assembly steps, no tethered pneumatics, no mechanical post-processing.
Printing the Instructions In
The key ingredient is a class of polymer called a liquid crystal elastomer. These materials contain rigid, rod-shaped molecules, known as mesogens, aligned along a preferred direction. When heated above a transition temperature, the alignment collapses from an ordered, nematic state into a disordered, isotropic one, and the polymer contracts along its alignment axis by roughly a third. Cool it down, and the alignment snaps back; the material expands. This cycle is reversible for at least a million cycles, which is more than most biological muscles manage, and it requires no tethered power source. The problem, historically, has been that you could only get these elastomers to do one thing: contract in a straight line. Complex motions, like a coil or a helix, required elaborate programming steps after the material was made.
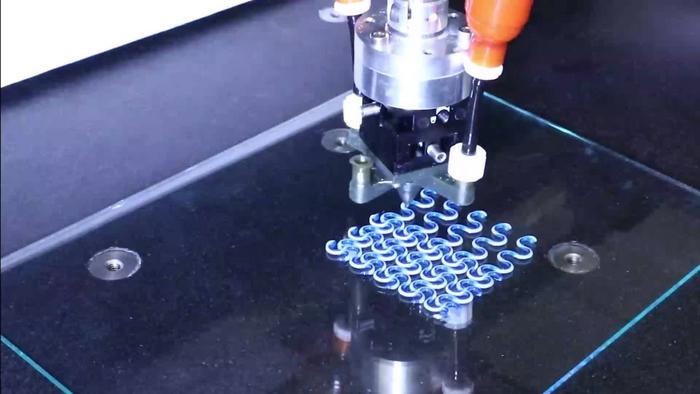
What Jennifer Lewis’s lab at Harvard’s School of Engineering and Applied Sciences introduced is a rotational multimaterial 3D printer, a system that coextrudes two different inks side by side through a single one-millimetre nozzle while the nozzle itself spins. One ink is the active liquid crystal elastomer. The other is a passive acrylate elastomer that barely changes shape regardless of temperature. As the nozzle rotates, it places these two materials in a controlled helical pattern around the filament’s cross-section, with the active half spinning relative to the passive half at a rate the researchers can dial up or down mid-print.
Postdoctoral researcher Mustafa Abdelrahman, the paper’s first author, came to this approach after working with liquid crystal elastomer sheets using considerably more laborious methods. When he encountered Lewis’s rotational printing platform, he described his reaction: “I saw this really beautiful [rotational 3D printing platform] and thought, ‘What if we plug in active materials and pattern them within the filament – can we drive shape change that way?'”
From a Single Filament to a Shape-Morphing Lattice
The logic of what follows is almost satisfyingly mechanical. Because the liquid crystal elastomer contracts along its molecular alignment direction when heated, and that alignment is now helically wound around the filament’s axis, the deformation the filament undergoes depends directly on the rotation rate used during printing. At low rotation rates the active material sits predominantly on one side of the cross-section, producing strong bending: the filament curves tightly, like a finger curling. Increase the rotation rate and the helical angle steepens; now the contracting material generates a coupled bending-and-twisting motion, producing toroidal coils the researchers describe as reminiscent of DNA supercoiling. At higher rates still, the helix angle approaches 45 degrees, the geometry that most efficiently converts axial contraction into torsion, and the filament twists with almost no change in overall length. Push higher again and bending re-emerges, because the helical angle has passed its sweet spot and is working against itself.
The filaments survive repeated thermal cycling between 25 and 175 degrees Celsius with no observable degradation over 100 cycles and no delamination at the interface between the two elastomers; because both inks are acrylate-based, UV curing forms covalent bonds between them rather than relying on adhesion alone.
Once the researchers had working individual filaments, they began assembling them into lattices: flat grids of sinusoidal, wavy strands. The deformation scales up predictably. If the active elastomer is placed on the outside of each wave’s curvature, heating straightens the filament and the lattice expands; if placed on the inside, heating increases the curvature and the lattice contracts. A 4×4 grid of expanding filaments roughly doubled its surface area on heating. Contracting lattices shrank by about 28%, limited mainly by the point at which neighbouring filaments begin to jam.
The more striking demonstrations come from mixing the two types within a single flat lattice. Place expanding filaments at the centre and contracting ones around the perimeter, and the initially flat grid morphs into a dome when heated. Invert the arrangement and it curls into a saddle shape. Both configurations closely matched the predictions of a computational model based on discrete elastic rod theory, developed in collaboration with the group of L. Mahadevan, a Harvard applied mathematician whose work has long focused on the mechanics of biological structures.
Grippers, Filters, and What Comes Next
The team demonstrated two practical applications, both of which are admittedly modest in scale but illustrate a design logic that could go considerably further. A flat expanding lattice mounted in a frame acts as a temperature-controlled filter: cool, the apertures are small enough to trap spheres; warm, they open and release them. A contracting lattice attached to an acrylic handle functions as a pick-and-place gripper capable of simultaneously grasping an array of small acrylic rods, lifting them, transporting them to a target location, and releasing them as it cools. Most soft grippers reported to date can manipulate a single object at a time; this one handled multiple objects simultaneously, which is roughly the difference between chopsticks and a hand.
Scaling the filaments down is possible, though it comes with trade-offs. Reducing the nozzle diameter from 1 mm to 0.5 mm produces filaments around 300 microns across, but requires slower print speeds, which reduces the shear-induced alignment of the mesogens and weakens the actuation response somewhat. Graduate student Jackson Wilt sees the architecture as intrinsically extensible: “you could create more complex nozzles that integrate with other materials in the future,” he said, pointing to possibilities like “a liquid metal channel to enable actuation, or integrating other functionality.”
The framework is not locked to liquid crystal elastomers, either. The researchers suggest the same geometric programming logic could apply to hydrogels, shape-memory polymers, or dielectric elastomers, with different material systems simply changing the amplitude of actuation, the response time, and the triggering stimulus. That’s a significant claim, and it remains to be demonstrated. But the underlying principle, encoding shape change into a filament’s internal geometry during fabrication rather than imposing it from outside, does seem genuinely transferable.
“This filament design and printing framework could accelerate the transition of artificial muscle-like materials from the lab to real-world technologies,” said Lewis. The practical distance between a silicone oil bath in a Harvard lab and a deployable soft robotic system is considerable. But the biological inspiration, at least, is clear enough: the elephant trunk didn’t need a controller. It just needed the right structure.
Source: Abdelrahman et al., Proceedings of the National Academy of Sciences, 2026
Frequently Asked Questions
How is this different from existing soft robots that bend and twist?
Most existing soft actuators rely on external pressure sources, like pumps and tubes, to drive movement, or they require multiple post-fabrication steps to program different motions into different parts. The Harvard approach encodes the specific type of deformation directly into the filament’s internal structure during printing, so no tethered power source or assembly is needed. The shape change is built in, the way muscle fibre architecture is built into a biological limb.
Could these filaments eventually work inside the human body?
Potentially, though the current system is triggered by heat in the range of 100 to 175 degrees Celsius, which rules out direct biological application as-is. The researchers note the framework could in principle be applied to other material systems with different triggering stimuli, and they specifically mention biomedical applications like injectable filaments that lock together to form porous, clot-promoting structures. That would require a different active material responding to a body-safe stimulus, and it remains speculative at this stage.
What stops the filament from just straightening out when you try to use it as a gripper?
The passive elastomer half of the filament resists deformation; it’s there specifically to act as a mechanical guide. The 50-fold difference in stiffness between the active and passive materials means that when the active side contracts, the passive side doesn’t just follow along, it forces the whole filament to curve or twist rather than shorten uniformly. The geometry does the work of channelling the contraction into the desired motion.
Is it true these filaments could double their surface area just from heating?
Yes, for the expanding lattice configuration. When the active elastomer is placed on the outside of each wave’s curvature in the lattice, heating causes the filaments to straighten and the overall grid area increases by roughly 99% on average in the experiments. The contracting configuration showed a more modest 28% area reduction, limited by the point at which adjacent filaments physically jam against each other.
ScienceBlog.com has no paywalls, no sponsored content, and no agenda beyond getting the science right. Every story here is written to inform, not to impress an advertiser or push a point of view.
Good science journalism takes time — reading the papers, checking the claims, finding researchers who can put findings in context. We do that work because we think it matters.
If you find this site useful, consider supporting it with a donation. Even a few dollars a month helps keep the coverage independent and free for everyone.