Point a conventional 3D sensor at a chrome-plated ball bearing and watch it fail. The laser light that should bounce back to the detector and reveal the object’s geometry instead shoots off at angles dictated by the surface’s curvature, most of it heading nowhere useful. The sensor, in effect, sees almost nothing. The same thing happens with surgical instruments slick with saline, with the glass rear window of a self-driving car, with the polished aluminium fittings in a factory inspection line. Specular surfaces (anything mirror-like, glassy, glossy) have been a stubborn blind spot for machine vision for decades.
A team at the University of Arizona thinks they’ve found a way around that, and the solution is almost embarrassingly elegant. Rather than building a better sensor or redesigning the projector patterns that conventional 3D imagers rely on, they’ve figured out how to repurpose the walls and furniture around a shiny object as a kind of improvisational screen. The room becomes the apparatus. “Essentially everything around you becomes a virtual screen,” says Florian Willomitzer, who leads the Computational 3D Imaging and Measurement Lab at the university’s Wyant College of Optical Sciences.
The work, published this week in Nature Communications, combines two measurement techniques that have always been treated as separate disciplines. One, called structured-light triangulation, is the workhorse of 3D sensing: project a known pattern onto an object, watch how it deforms from the camera’s viewpoint, do the geometry. It works brilliantly on matte surfaces but fails entirely on mirrors. The other, called deflectometry, does the opposite: it measures how a reflective surface distorts the image of a large patterned screen placed nearby. Works on chrome, useless on fabric.
The problem, historically, is that real-world scenes aren’t made of one thing. “Think of the interior of a car or a living room,” Willomitzer says. “Those environments include specular materials, such as mirrors, glass or polished metal finishes, alongside diffuse surfaces, such as walls, fabric and furniture.” A surgical site is similarly mixed: glistening moist tissue and dull skin, in the same field of view. Most 3D sensors, optimised for one type, simply give up on the other.
The Walls Have Eyes
The conventional fix for deflectometry’s screen problem has been to build bigger screens. For car-body inspection, manufacturers have constructed tunnel-length assemblies, whole rooms lined with calibrated displays, large enough to accommodate an entire vehicle. Expensive, immovable, limited to a single task. The Arizona approach sidesteps all of this by observing that diffuse surfaces (a white wall, a fabric sofa, a matte-painted ceiling) do everything a calibrated screen does, if you can figure out where they are in space.
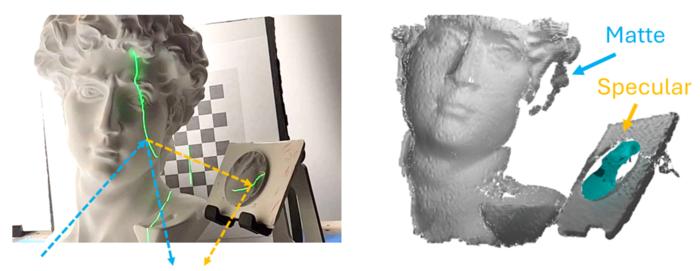
Here’s the trick. A scanning laser sweeps the room twice, in perpendicular directions. An event camera (more on that in a moment) records wherever the laser touches something. The team’s algorithms chew through those signals and use epipolar geometry (roughly, the geometric constraint that light from a known source must appear along a predictable line in the camera image) to separate direct reflections from indirect ones. Direct signals come from matte surfaces; indirect signals, bouncing once off a matte wall before hitting a shiny object and reaching the camera, carry information about that shiny surface’s shape. The matte surfaces, whose positions are now known from the triangulation pass, slot into the role of deflectometry screen. No calibration. No fixed hardware. The screen reconstructs itself from whatever happens to be in the room.
“We can use a laser scanner to capture everything in the room, with whatever is inside,” says Aniket Dashpute, the paper’s first author, now a doctoral student at Rice University. “We then use our algorithms to separate the diffuse from the specular surfaces and can eventually use all measured diffuse scene parts as a virtual screen for the deflectometry measurement of the specular parts.” A piece of uncalibrated cardboard, it turns out, works perfectly well as the screen, and because the system triangulates its position fresh for every frame, you can even move it around a stationary object to increase coverage without recalibrating anything.
A Camera That Doesn’t Take Pictures
The event camera is probably the stranger component of the pair. Unlike a conventional camera, which captures complete image frames at a fixed rate, an event camera records only the moments when individual pixels change in brightness. Each pixel fires asynchronously, producing a timestamped signal the instant it detects a shift. The result is a stream of sparse events rather than a sequence of dense frames, not unlike the way retinal ganglion cells in the eye respond to change rather than to static illumination.
The practical upshot is speed and dynamic range. “The event camera can handle vastly different light levels, from very dim to extremely bright,” says Jiazhang Wang, a postdoctoral researcher on the team. “This allows us to measure all object surfaces in a scene with high accuracy, despite their huge variations in surface reflectivity.” When a laser line sweeps across a shiny balloon and a matte plaster bust in the same pass, the camera doesn’t blow out on the one or lose signal on the other. In the lab experiments, the system captured mixed-reflectance scenes at around 14 frames per second, with depth accuracy better than 0.6 millimetres. For scenes with only matte surfaces, where the deflectometry step isn’t needed, it ran at up to 250 Hz, one of the fastest 3D scans on record for an event-based system. That’s fast enough to track a bouncing table tennis ball in real time, which they also demonstrated.
Commercial depth sensors (Intel’s RealSense and Microsoft’s Kinect are both standard references in the field) produced depth errors roughly ten times larger, and both largely failed on specular surfaces. That gap is unlikely to close quickly; the physics of single-bounce reflection from mirrors is genuinely hostile to standard structured light.
From Surgical Theatre to the Driveway
Willomitzer’s ambitions for the technology span a range that’s almost comically wide, though none of it seems unreasonable given the results. “Scalability is an important requirement for the wide spectrum of 3D imaging applications,” he says, “from measuring small, shiny blood vessels during surgery to digitising entire rooms or buildings.” Robotic surgery is an obvious candidate; a laparoscopic camera already operates in a scene with mixed reflectance, and 3D sensing that loses the plot on wet tissue would be a significant liability. Autonomous vehicles need similar capabilities for the chrome bumpers and reflective road signs that currently confuse depth cameras.
There are limits worth noting. The virtual-screen approach only works if there’s something diffuse in the field of view to serve as the screen; a room composed entirely of mirrors is contrived but not impossible. The method’s deflectometry accuracy, around 450 micrometres, is also considerably lower than the sub-micrometre precision achievable with large calibrated lab setups, because uncertainty from the triangulation step propagates into the specular reconstruction. For measuring optical-quality surfaces it wouldn’t be the tool of choice.
But for the genuinely chaotic reflectance conditions of a surgical theatre, a factory floor, or a living room being scanned for mixed reality? The lab demonstrations suggest it copes rather well. Willomitzer has talked about extending the idea to 360-degree scanning, effectively turning a whole room into a dome-shaped screen with the event camera and laser at the centre, every wall and piece of furniture contributing to the measurement. That’s a more speculative path, but one the current results seem to support. The machines, perhaps, are finally learning to see the way a room actually looks.
Frequently Asked Questions
Why do standard 3D cameras struggle with shiny or reflective surfaces?
Most 3D sensors work by projecting a pattern onto an object and measuring how it deforms, a method called structured-light triangulation. On a matte surface, light scatters in all directions and the camera catches a clear signal. On a mirror or polished metal, the light bounces off at a specific angle determined by the surface’s curvature rather than back toward the sensor, so the detector receives almost no usable information. The Arizona team’s system handles this by also capturing the secondary reflections that bounce off nearby matte surfaces, extracting shape information from those indirect paths instead.
What is an event camera and why does it matter here?
An event camera is a sensor that records only pixels undergoing brightness change, rather than capturing complete image frames at fixed intervals. Each pixel fires asynchronously, producing a timestamped signal the instant it detects a shift. This gives event cameras extremely high temporal resolution and a dynamic range large enough to handle both dim matte surfaces and intensely bright mirror reflections in the same scene simultaneously, which conventional cameras can’t manage without separate exposure settings.
Could this technology be used in self-driving cars?
Autonomous vehicles rely heavily on 3D sensing to map their surroundings in real time, and they regularly encounter reflective surfaces: chrome bumpers, glass windows, wet road markings, polished signs. Current depth cameras struggle with all of these. The virtual-screen approach demonstrated at Arizona is still at laboratory scale, but the underlying method is designed to be scalable, and autonomous navigation is one of the applications the researchers explicitly highlight as a target.
How does the system reconstruct a shiny object without a dedicated screen?
A scanning laser sweeps the scene twice, horizontally and vertically. The event camera records every brightness change those sweeps produce. Algorithms then use geometric constraints to classify each detected signal as either a direct reflection from a matte surface or an indirect reflection that has bounced off a matte surface before reaching a shiny one. The matte surfaces, whose positions are calculated during the triangulation step, effectively become the calibrated screen that conventional deflectometry would require as fixed hardware. No pre-installation needed; the system works out the screen geometry fresh for every captured frame.
What are the current limits of the approach?
The method requires at least some diffuse, matte surfaces in the scene to serve as virtual screens; a space containing only mirrors or glass would leave it without a reference. Its depth accuracy on specular surfaces, around 0.45 millimetres, is also substantially lower than high-end conventional deflectometry setups, which can achieve sub-micrometre precision. For applications requiring extremely fine measurement of optical surfaces, dedicated lab systems remain the better choice. For mixed real-world environments, however, the trade-off in precision appears to be well compensated by the gain in flexibility.
ScienceBlog.com has no paywalls, no sponsored content, and no agenda beyond getting the science right. Every story here is written to inform, not to impress an advertiser or push a point of view.
Good science journalism takes time — reading the papers, checking the claims, finding researchers who can put findings in context. We do that work because we think it matters.
If you find this site useful, consider supporting it with a donation. Even a few dollars a month helps keep the coverage independent and free for everyone.