Iron ions drift into a freshly printed gel, soaking through its polymer mesh the way water moves into a sponge. Then the gel is dipped into a second bath, this one laced with hydroxide ions, and something clicks: the iron bonds, crystallizes, becomes magnetite, iron oxide nanoparticles forming in place, locked inside the structure, too small to see without an electron microscope. The gel, moments earlier just a passive polymer scaffold, is now magnetic. Not uniformly, not randomly, but in precise gradations that the researchers programmed into it weeks before, when they were still just flashing a laser into a pool of resin.
The result of this double-dip chemistry is a new class of soft, microscopic robot, perhaps the most controllable one yet: structures smaller than a millimeter that can grip, flip, and latch in response to an ordinary refrigerator magnet waved nearby, with no wires, no batteries, no contact required.
Engineers at MIT, working with collaborators at the École Polytechnique Fédérale de Lausanne and the University of Cincinnati, describe the method in the journal Matter. The core trick is separating two processes that researchers have long tried, with mixed results, to combine. In conventional approaches to magnetic microprinting, magnetic particles are mixed directly into the resin before printing, and the particles scatter the laser light, weakening the structure or preventing it from forming at all. Rachel Sun, a graduate student and co-lead author on the paper, describes the fundamental tension: printing deformable microscale structures with a high fraction of magnetic particles is extremely difficult, she says, often involving a tradeoff between magnetic functionality and structural integrity. The MIT team’s solution is to print first, magnetize second.
Specifically, they use two-photon polymerization, a high-resolution 3D printing technique that traces microscopic patterns into resin with repeated laser flashes, building up a three-dimensional structure layer by layer. The key insight is what happens to the printed gel in the chemical baths afterward.
Crosslink density (basically how tightly packed the polymer mesh is) turns out to control how many iron ions the gel can absorb, which in turn determines how many magnetic nanoparticles form inside it. And crosslink density is set by how much laser energy hits each spot during printing. Tune the laser power up and you get a tighter mesh that admits fewer ions and produces fewer particles; tune it down and the mesh is looser, the ion uptake higher, the resulting magnetism stronger. In a single printing run, using a single resin and a single chemical bath, the team can produce structures with precisely varying magnetic responses in different regions.
“We can now make a soft, intricate 3D architecture with components that can move and deform in complex ways within the same microscopic structure,” says Carlos Portela, the Robert N. Noyce Career Development Associate Professor of Mechanical Engineering at MIT, who leads the group. Sun puts it slightly differently: the approach, she says, provides unprecedented design freedom to print multifunctional structures and materials at the microscale.
Why Magnets, Specifically
For Portela’s group, the choice of magnetic actuation over other stimuli: heat, light, chemical gradients, electric fields, is not arbitrary. Andrew Chen, a graduate student and the paper’s other co-lead, explains the preference in terms of the physics: with a magnetically responsive material, he says, you have control at a distance and the response is instantaneous. There’s no waiting for a slow diffusion process, no need for electrodes or contact. The material obeys the field; the field is wherever you move the magnet. At microscales, where attaching a tether is impractical and response time matters, that combination is close to ideal.
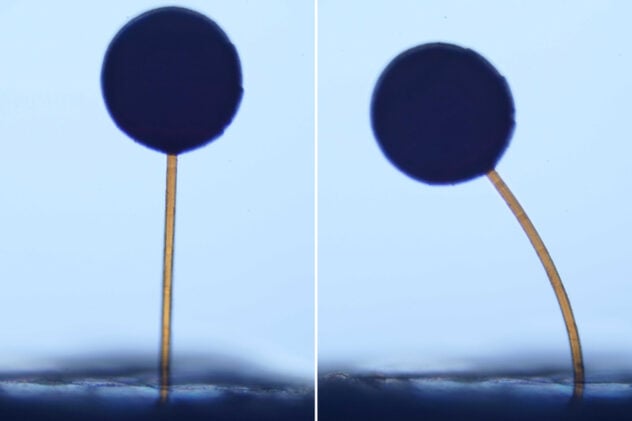
The team demonstrated the approach through two prototype devices. The more visually striking is a soft robotic gripper assembled from lollipop-like structures, each less than a millimeter tall, with polymer balls (smaller than a grain of sand) attached to thin polymer sticks. The balls were infused with varying amounts of magnetic particles, giving each one a different degree of magnetism. Under a microscope, when a magnet is passed over the petri dish containing them, the lollipops bend toward it in graduated degrees (the most magnetic bending furthest), mimicking the action of closing fingers. A second demonstration was more utilitarian: a bistable switch, about a millimeter long, with tiny oar-like magnetic structures (roughly 8 microns thick, about the diameter of a red blood cell) attached to either side. Apply a magnet on one end and the oars flip, pulling the whole rectangle and locking it in position. Apply the magnet on the other end and it flips back. Portela describes it as potentially a new kind of bistable mechanism that could function as a magnetic valve in a microfluidic device.
The team also validated the design computationally, using a coupled magnetomechanical model that predicted how the structures deform under applied fields. The model held up not just for conditions the researchers had tested in the lab, but generalised beyond them, which matters if you want to design devices with any confidence before committing to fabrication.
Getting Into the Body
Portela is careful about what the work does and doesn’t claim. The biopsy gripper, he says, is a vision that others can take from this work rather than something the team is building toward clinically. The gap between a proof-of-concept gripper in a petri dish and a device that can navigate vasculature or tissue is considerable; getting there would require, at minimum, demonstrating biocompatibility, navigability in fluid environments, and the ability to release or retain whatever it grabs on command. None of that is addressed in this paper.
There’s also the question of scale-up. Two-photon polymerization is genuinely high-resolution, but it is also slow: the laser traces each feature point by point, and fabricating even a small batch of devices takes time. Manufacturing at anything approaching clinical volume would require either parallelizing the printing process or moving to a different technique that preserves the spatial programmability the team has developed.
What the paper does establish, more solidly than before, is that spatial control over magnetic properties at the microscale is achievable without compromising structural integrity, and that the relationship between printing parameters and magnetic behavior is predictable enough to model and generalize. For a field that has mostly worked with either hard magnetic particles (which are stiffer and restrict deformation) or soft magnetic composites requiring impractically high particle loading and very strong field gradients, having a third option with arbitrary geometry and tunable local response is worth paying attention to. The lollipops in the petri dish are, in a sense, the least interesting thing about this. What matters is the grammar they’re written in.
Source: https://doi.org/10.1016/j.matt.2026.102809
Frequently Asked Questions
Could a magnet-guided microrobot actually take a biopsy inside the human body?
Not yet, but the new MIT work takes the underlying engineering problem seriously for the first time at this scale. The gripper demonstrated in the lab can open and close in response to a magnet swipe, which is the right basic motion, but navigating inside tissue, confirming biocompatibility, and reliably releasing a sample are separate challenges the current paper doesn’t address. The pathway is plausible; the timeline is not.
Why is it so hard to 3D print magnetic robots at microscale?
The usual approach mixes magnetic particles directly into the printing resin, and the particles scatter laser light unpredictably, weakening or collapsing the structure. The MIT team sidesteps this by printing the polymer structure first, then growing the magnetic nanoparticles inside it chemically, after the fact. That separation is what makes fine geometric control and strong magnetism compatible for the first time at this resolution.
How do these microrobots actually move if nothing is physically attached to them?
The iron oxide nanoparticles inside the polymer are soft-magnetic, meaning they align with an external field rather than maintaining a permanent magnetization. When a magnet approaches, the particles are pulled toward it, and because the polymer is soft and elastic, the structure bends and deforms rather than rigidly translating. By varying how many particles different regions contain, different parts of the same structure respond by different amounts, producing complex deformations from a single applied field.
What’s a bistable mechanism and why would you want one at this size?
A bistable mechanism has two stable resting positions and snaps between them when pushed past a threshold, like a light switch. At microscale, that’s useful as a valve, a sensor latch, or a bit of mechanical memory that holds its state without continuous power. The MIT team’s magnetic version flips between states in response to a magnet applied to either end, which means it could potentially open or close flow channels in a microfluidic chip without any on-board electronics.
ScienceBlog.com has no paywalls, no sponsored content, and no agenda beyond getting the science right. Every story here is written to inform, not to impress an advertiser or push a point of view.
Good science journalism takes time — reading the papers, checking the claims, finding researchers who can put findings in context. We do that work because we think it matters.
If you find this site useful, consider supporting it with a donation. Even a few dollars a month helps keep the coverage independent and free for everyone.