The gap was eight millimetres. The cockroach was taller than that, and it knew it, in whatever way a cockroach knows things. It lowered its head, swept its antennae across the underside of the shutter blocking the corridor, and shoved. The shutter lifted. The insect was through in a little under ten seconds, the same as any of its untouched cage-mates. The difference was that this one had a radio, a microprocessor and a battery sealed inside its abdomen.
That detail is the whole point. A team led by Hirotaka Sato at Nanyang Technological University in Singapore has spent years building remote-controlled insects, and the field has a stubborn habit it has never quite shaken: it bolts the hardware on top.
The standard “cyborg insect” wears its electronics like a rucksack, a printed circuit board glued to the thorax, wired into the antennae for steering and the rear sensory organs, the cerci, for go. It works on a flat table. It works rather less well in the cluttered, half-collapsed, pipe-and-rubble environments that are the entire reason anyone wants a steerable cockroach in the first place. The backpack snags. The insect, lopsided and top-heavy, stops behaving like an insect.
So Sato’s group asked a question that sounds obvious only in hindsight. What if you put the kit inside?
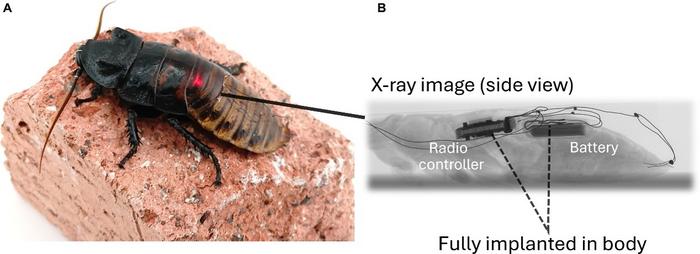
The controller they came up with measures ten millimetres on a side and about three high, weighs half a gram, and runs on a nine-milliamp-hour lithium-polymer battery that goes in too. It talks to a base station on sub-1 GHz radio, reaching roughly 26 metres, and fires biphasic electrical pulses to nudge the animal left, right or forward. A silicone coating keeps it biocompatible and keeps the cockroach’s insides out of contact with bare circuitry. “We designed a wireless controller that is only 10 mm wide, 10 mm long and 3 mm high, small enough to be implanted entirely into the cockroach’s abdomen,” says Sato.
The roundness problem
Here is where it gets interesting, because the benefit is not the one you might guess. You would assume the win is tidiness, or weight. It is geometry. Cockroaches squeeze through gaps by rolling their rounded bodies sideways, a passive mechanical trick where the shape itself does some of the work, reducing drag and helping the body rotate. Glue a flat plastic board to the animal’s back and you flatten that roundness. The roll stops happening.
The numbers are blunt about it. On a test track with that eight-millimetre shutter, intact cockroaches pushed through 95 per cent of the time. The backpack-wearing cyborgs managed it on just 15 per cent of attempts, taking more than twice as long when they did, repeatedly heaving the shutter far higher than they needed to, often giving up and trying to climb instead. The implanted insects? Ninety per cent success, and a traversal time of 8.1 seconds, fractionally quicker than the unmodified animals at 9.6. “The implant does not alter the body’s roundness or the natural tripod gait,” says Sato. The streamlined shape stays streamlined, which is exactly what helps an insect corkscrew through a slot too small for it.
Steering still had to be shown off, naturally, so the team wrote an automatic navigation algorithm and set the cyborgs loose toward a virtual target. When forward speed dropped below 5 mm/s, a pulse to the cerci kicked the animal back into a walk; when its heading drifted more than 45 degrees off course, an antenna stimulus turned it back. Across 66 trials it hit the target about 91 per cent of the time. Then came the real exam: a three-stage obstacle corridor of stacked bricks, a tangle of randomly strewn cables and a narrow slit. Backpack cyborgs cleared the slit zero per cent of the time. The implanted ones got through it 63 per cent, cleared the bricks 95 per cent, the cables 89, and did all of it faster.
“The backpack often got snagged on bricks or cables, forcing the insect to reroute or give up,” Sato notes. The implant, by contrast, leaves the cockroach free to roll, side-step and push its way along, using the full behavioural repertoire evolution already gave it.
The cost of going inside
None of this is free, and the paper is honest about the cost. The procedure is surgery. Cut the membrane between two abdominal segments, slide in a battery, slot the controller higher up the body. The first attempts went badly: four of seven insects died inside a week, the electronics having been forced in against the internal tissues. After the team started gently detaching those tissues with a small spatula before insertion, survival at seven days climbed from 43 to 86 per cent, with several animals living past 50 days and a few beyond 80.
Whether that counts as good enough depends entirely on the job. For search-and-rescue after an earthquake, or for crawling a length of pipe between two manholes, the missions the authors have in mind, you need the animal working for hours to a few days, not months. By that yardstick the technology is arguably already usable. There are softer questions too, the ones that hover over any project that turns a living animal into a remote-controlled tool, and the paper does not pretend to settle them.
What it does settle is a piece of engineering folklore that turns out to be wrong. The mounting was never a minor implementation detail to be optimised later. “Our study shows that how you attach the electronics is not a minor detail, it directly determines whether the cyborg can actually navigate the terrain it was meant to explore,” Sato concludes. Get it wrong and you have built a robot that fails in exactly the places it was made for; get it right, and the cockroach is still, mostly, a cockroach. Next the group wants flexible electronics that bend with the abdomen, biofuel cells or solar films to ditch the battery surgery, and onboard cameras and sensors so the insect can eventually find its own way. Body intelligence, hard-won over a few hundred million years, left politely intact.
Source: Cyborg and Bionic Systems, DOI: 10.34133/cbsystems.0589
Frequently Asked Questions
Why does it matter whether the electronics go inside the insect or on its back?
Because a cockroach’s rounded body is part of how it moves through tight spaces, rolling and rotating to slip through gaps narrower than itself. A board glued to the back flattens that shape and the animal loses the trick, while an internal implant leaves it intact. In testing, that single difference swung the success rate at one obstacle from 15 per cent to 90.
Is it true the implanted cockroach moves just as well as a normal one?
Strikingly close, yes. Implanted insects negotiated an eight-millimetre gap in 8.1 seconds on average, a hair faster than the 9.6 seconds taken by untouched controls, and their walking gait was statistically unchanged. The surgery adds hardware without obviously dulling the animal’s natural movement, which is the whole reason the approach works.
How do you actually steer a living cockroach?
The implant delivers small electrical pulses to the insect’s sensory organs: stimulating an antenna makes it turn away from that side, and stimulating the rear cerci prompts it to walk forward. An algorithm can string these cues together to drive the animal toward a target on its own. The team even found that pulsing both antennae at once for just over a second reliably makes the cockroach reverse.
Could these cyborg insects really be used in disasters?
That is the goal, with post-earthquake searches and pipeline inspection named as the leading uses. The insects only need to survive hours to a few days for such missions, and refined surgery now keeps most alive well past a week. The remaining work is adding cameras and sensors so they can navigate without a human at the controls.
What’s still stopping this from being practical at scale?
Three things, mainly: the implantation is delicate surgery, survival times still vary, and the rigid battery and board don’t yet flex with the insect’s body. The researchers are chasing flexible electronics and battery-free power, drawn from biofuel cells or thin solar films, to make the whole package less invasive. Until then, each cyborg is closer to a short-lived tool than a reusable robot.
ScienceBlog.com has no paywalls, no sponsored content, and no agenda beyond getting the science right. Every story here is written to inform, not to impress an advertiser or push a point of view.
Good science journalism takes time — reading the papers, checking the claims, finding researchers who can put findings in context. We do that work because we think it matters.
If you find this site useful, consider supporting it with a donation. Even a few dollars a month helps keep the coverage independent and free for everyone.