The wing doesn’t fight the current. It feels it coming.
Submerged in a recirculating water tunnel at the University of Southampton, a silicone foil about the size of a hardback book was subjected to a sudden, sharp change in the angle of oncoming flow — the underwater equivalent of a gust hitting a plane’s wing. The rigid steel hydrofoils you’d find on today’s autonomous underwater vehicles would lurch, jolting sideways with enough force to knock a drone off its intended course. This one did something different. Tiny capacitance signals pulsed through six liquid-metal wires embedded in its skin. A microcontroller registered the wing’s own flexing. Hydraulic pressure adjusted. The wing reshaped itself, and the jolt never really came.
That 87 per cent reduction in unwanted lift impulse — published this month in *npj Robotics* by researchers from Southampton, Edinburgh and Delft — is the headline number. But the deeper story is about proprioception, a sense so fundamental to living things that we barely notice it. Right now, without thinking, you know where your hands are. You can walk in the dark, catch a thrown ball, feel when you’re about to overbalance. Proprioception is what makes that possible: the body’s internal awareness of its own position and forces. For decades, roboticists have been trying to give machines something equivalent. In the ocean, it turns out, that problem is genuinely hard.
Autonomous underwater vehicles are, by and large, flying bricks. They work by brute force — rigid bodies, powerful thrusters, aggressive control algorithms that throw energy at disturbances rather than working with them. The ocean doesn’t cooperate. Near-shore environments and the open sea alike are shot through with unpredictable currents, wave-driven turbulence, and sudden shifts in flow direction. An AUV tasked with inspecting a pipeline or surveying coral reef needs to hold station, follow a precise path, sometimes operate within centimetres of a structure. Rigid vehicles struggle, burning through battery reserves to counteract every perturbation. “Ocean environments are dynamic and unpredictable, so robots must continually sense what is happening around them and respond accordingly,” says Professor Blair Thornton of the University of Southampton, a co-author on the paper.
Animals solved this problem a very long time ago. A barn owl gliding through turbulent air adjusts its wing shape in milliseconds, mechanoreceptors in its feathers feeding back information on strain and vibration. Kestrels hover with eerie precision over motorway verges in crosswinds that would send a drone spinning. Fish are, if anything, even more sophisticated: the lateral line — a canal system running along the body — gives them something like a sixth sense for water movement around them, while innervated fin rays provide proprioceptive feedback on the forces bending each individual fin. Trout exploit this to surf the vortices shed by rocks in fast rivers, a behaviour called Karman gaiting, essentially letting the turbulence do their swimming for them. The bluegill sunfish manoeuvres with fin-based precision that would humble most engineered systems.
Leo Micklem, then at Southampton and now at Portland State University, was the lead author trying to bring some of that biology into hardware. The core idea was that an underwater wing, if soft enough, would deform slightly in response to flow disturbances — and if you could read those deformations in real time, you’d have an early warning system requiring no external sensors at all. The wing would feel what was coming through its own body. “Instead of building ‘tougher’ robots designed to fight the ocean’s power,” Micklem says, “we are moving toward smarter, softer machines that work in synergy with the environment.”
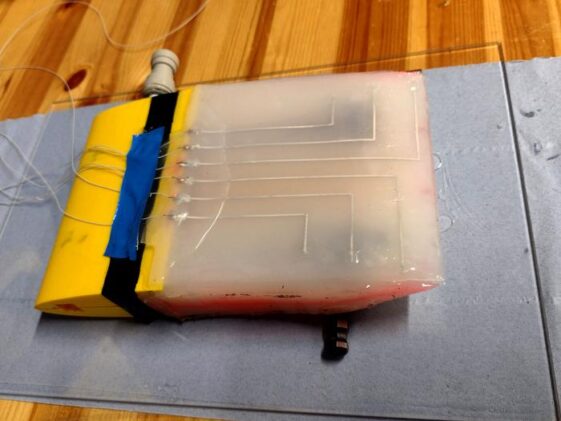
The engineering involved two interlocking innovations. The wing itself is a hybrid structure: a rigid leading edge for stability, attached to a soft silicone tail with two inflatable tubes running through it. By pressurising these tubes hydraulically, the team can change both the wing’s stiffness and its camber — the curvature from leading to trailing edge. Increasing the camber at the right moment, it turns out, can compensate for the change in lift that a gust would otherwise produce. Same lift, different shape, disturbance absorbed.
The second innovation is the e-skin: a 2 mm-thin silicone sheet with six electrodes made from a eutectic gallium-indium alloy — a liquid metal at room temperature that remains conductive even as the material stretches and bends. Nine pairs of these electrodes measure capacitance across the skin; as the wing flexes, the spacing between electrodes changes, the capacitance signals shift, and a small neural network trained on underwater video footage of tracking markers converts those signals into an estimate of the wing’s instantaneous camber. The whole system runs at 30 Hz with an average estimation error of just 0.52 per cent.
What makes the approach clever is the detection strategy. When a gust hits, the soft wing doesn’t just deviate — it rings, briefly, like a struck bell. The camber oscillates and then decays, a characteristic signature the controller has been trained to recognise. Spot that signature, identify the direction of the disturbance, pump up the hydraulics accordingly. In tests with square-wave gusts (a sudden step change in flow angle, held, then released), the closed-loop system detected roughly 70 per cent of events and successfully compensated for both positive and negative perturbations. Triangle-wave gusts — more gradual ramps — were too slow to produce the sharp camber signature, which is a known limitation the team is working to address.
The performance numbers bear some examination. Compared to a rigid wing, the soft wing with active control reduces peak impulse by 87 per cent. The purely passive flexible wing — no hydraulics, just the silicone’s inherent give — still outperforms the rigid design by about threefold, which shouldn’t be surprising when you think about how leaves flatten against wind, or how flexibility reduces rather than resists loading. Active control then adds another significant margin on top. The response is four times faster than comparable morphing wings built from shape-memory alloys, which require seconds rather than fractions of a second to change shape. Energy consumption is dramatically lower too, roughly five orders of magnitude less than thermally actuated alternatives.
The barn owl comparison in the paper — that the wing’s disturbance rejection is roughly double the owl’s during glide — comes with appropriate caveats, since comparing a single flat wing section in a laboratory tunnel to a living bird in turbulent air isn’t straightforward. But the rough equivalence suggests the approach isn’t far from where biology operates after millions of years of refinement.
There are, of course, real obstacles between a wing section in a water tunnel and a fully functional AUV. Integrating soft, deformable components with the rigid frame of an actual vehicle is a materials and engineering challenge; the soft-to-rigid interface is a known failure point in soft robotics generally. The current hydraulic actuator is too slow for faster gusts. Scaling the e-skin to a larger, three-dimensional wing surface will require advances in fabrication and training protocols. None of these are trivial.
What the work demonstrates, though, is a principle rather than a product. Softness, properly instrumented, can be made intelligent. The body’s own deformation can carry information that cameras and external sensors cannot easily replicate — because the body is already at the right place, already responding, already part of the signal. Whether that intelligence eventually lives in underwater drones mapping the deep sea, or inspection robots navigating around offshore wind turbines, or something nobody has quite thought of yet, remains to be seen. The kestrels and the trout figured this out long before we did. We’re catching up.
Study link: https://www.nature.com/articles/s44182-026-00078-z
ScienceBlog.com has no paywalls, no sponsored content, and no agenda beyond getting the science right. Every story here is written to inform, not to impress an advertiser or push a point of view.
Good science journalism takes time — reading the papers, checking the claims, finding researchers who can put findings in context. We do that work because we think it matters.
If you find this site useful, consider supporting it with a donation. Even a few dollars a month helps keep the coverage independent and free for everyone.